闵行区2022学年第一学期期末
- 下载
- 2022/12/20
- 227 次
- 968 K
1.下面关于物理量的正负表述正确的是
A.功的正负表示大小 B.重力势能的正负表示大小
C.电量的正负表示方向 D.电势的正负表示方向
【答案】
B
【解析】
A.功是标量,正负号不表示方向,也不表示大小,表示的是该力是动力还是阻力,故 A 错误;
B.重力势能是标量,其正负表示大小,故 B 正确;
C.电量是标量,正负号不表示方向,表示的是电性,故 C 错误;
D.电势的正负表示电势的高低,即表示的是大小,但不表示方向,故 D 错误。
故选 B。
2.下列式子不属于比值法定义物理量的是
A.a =
【答案】
A
【解析】
一般比值法定义的物理量基本特点是被定义的物理量往往反映的是物质的本质属性不随定义所用的物理量的大小而改变;所以 E =
故选 A。
3.下列用国际基本单位表达电场强度的单位正确的是
A.kg·m/(C·s2) B.kg·m/(A·s3) C.V/m D.N/C
【答案】
B
【解析】
根据公式 E =
根据公式 E =
根据公式 F = ma,q = It
可得 1 N/C = 1 kg·m/(C·s2) = 1 kg·m/(A·s·s2) =1 kg·m/(A·s3)
故选 B。
4.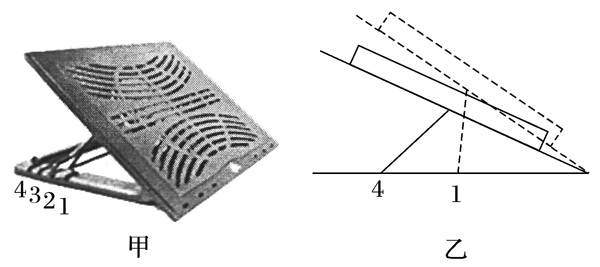 笔记本电脑静止在可调节角度的底座上,如图所示,对比底座处于卡位 1 和卡位 4 时
笔记本电脑静止在可调节角度的底座上,如图所示,对比底座处于卡位 1 和卡位 4 时
A.卡位 4 电脑受到的摩擦力大
B.卡位 4 电脑受到的支持力小
C.底座对电脑的作用力始终不变
D.电脑受到的支持力与摩擦力大小之和等于其重力
【答案】
C
【解析】
AB.设底座与水平面的倾角为 θ,电脑的质量为 m,底座对电脑的摩擦力大小为 f,支持力大小为 N,根据受力平衡可得
N = mgcosθ,f = mgsinθ
对比底座处于卡位 1 和卡位 4 时,由于卡位 4 的倾角 θ 较小,则卡位 4 电脑受到的摩擦力小,电脑受到的支持力大,故 A、B 错误;
C.根据平衡可知,底座对电脑的作用力大小等于电脑的重力,方向竖直向上,即底座对电脑的作用力始终不变,故 C 正确;
D.电脑受到的支持力与摩擦力大小之和为 N + f = mgcosθ + mgsinθ,不一定等于 mg,故 D 错误。
故选 C。
4.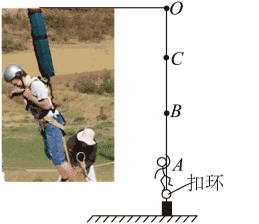 如图为“反向蹦极”运动简化示意图.假设弹性轻绳的上端固定在 O 点,拉长后将下端固定在体验者身上,并通过扣环和地面固定.打开扣环,人从 A 点静止释放,沿竖直方向经 B 点上升到最高位置 C 点,B 点时速度最大.不计空气阻力,则下列说法正确的是
如图为“反向蹦极”运动简化示意图.假设弹性轻绳的上端固定在 O 点,拉长后将下端固定在体验者身上,并通过扣环和地面固定.打开扣环,人从 A 点静止释放,沿竖直方向经 B 点上升到最高位置 C 点,B 点时速度最大.不计空气阻力,则下列说法正确的是
A.从 A 点到 C 点过程中,人的机械能一直在增大
B.从 A 点到 B 点过程中,弹性轻绳的弹性势能一直在减小
C.B 点为弹性轻绳处于原长的位置
D.从 B 点到 C 点过程中,人的机械能保持不变
【答案】
B
【解析】
AC.根据题意可知,在 B 点速度最大,则加速度为零,此时弹性轻绳的弹力等于人的重力,故此时弹性轻绳仍处于拉长状态,弹性轻绳的原长状态必处于 B、C 之间,设为 E 点,从 E 点到 C 的过程中,人做竖直上抛运动,机械能保持不变,故 A、C 错误;
B.根据 A 项的分析,从 A 点到 B 点的过程中,弹性轻绳处于拉长状态,弹力一直向上,弹力一直对人做正功,故弹性势能一直减小,故 B 正确;
D.由 A 项分析可知,从 E 点到 C 的过程中,人做竖直上抛运动,机械能保持不变,但是有 B 到 E 的过程中,弹力依然对人做正功,人的机械能是在增加的,故 D 错误。
故选 B。
6. 电路如图所示,电源内阻为 r,L1、L2、L3 为相同规格小灯泡,当可变电阻 R 的滑片向右滑动时
电路如图所示,电源内阻为 r,L1、L2、L3 为相同规格小灯泡,当可变电阻 R 的滑片向右滑动时
A.小灯泡 L1 比 L2 亮,L2 比 L3 亮
B.电源损耗功率增加
C.电源效率降低
D.灯泡 L2 变暗
【答案】
D
【解析】
A.由于灯泡 L2 支路的总电阻大于灯泡 L3 支路的电阻,所以灯泡 L2 支路的电流小于灯泡 L3 支路的电流,即 L2 比 L3 暗,A 错误;
B.滑动变阻器的滑片向右滑动时,接入电阻增大,干路电流减小,根据 P内 = I2r 可知,电源内阻损耗功率减小,B 错误;
C.根据 η =
可知,滑动变阻器的滑片向右滑动时,接入电阻增大,外电阻增大,电源效率增大,C 错误;
D.滑动变阻器的滑片向右滑动时,接入电阻增大,可分析出灯泡 L2 中的电流减小,灯泡变暗,D 正确。
故选 D。
7. 关于“手动挡”汽车爬陡坡,下面司机的操作合理的是
关于“手动挡”汽车爬陡坡,下面司机的操作合理的是
A.司机只要踩油门即可,无需关心挡位是否合适
B.为了提高速度冲上陡坡,司机应该换挡位至“高速挡”
C.为增大牵引力,司机应该换挡位至“低速档”
D.司机应该换挡位至“高速挡”,并踩油门
【答案】
C
【解析】
根据 P = Fv 在功率一定的情况下,当速度减小时,汽车牵引力增大,此时容易上坡,所以为增大牵引力,司机应该换挡位至“低速档”。
故选 C。
8. 图为一列简谐横波某时刻的波形图,此后 N 质点比 M 质点先回到平衡位置.下列判断正确的是
图为一列简谐横波某时刻的波形图,此后 N 质点比 M 质点先回到平衡位置.下列判断正确的是
A.该简谐横波沿 x 轴正方向传播
B.此时 M 质点速度沿曲线的切线方向向上
C.此时 M 质点的速度比 N 质点的小
D.此时 M 质点的加速度比 N 质点的小
【答案】
D
【解析】
A.由于 N 质点比 M 质点先回到平衡位置,则 M 点先向上振动,由微平移法可知该简谐横波沿 x 轴负方向传播,故 A 错误;
B.M 质点振动方向向上,不是曲线切线方向,故 B 错误;
CD.由机械振动可知,离平衡位置越近,速度越大,回复力越小,加速度越小,所以 M 质点速度大于 N 质点速度,M 质点加速度小于 N 质点加速度,故选项 C 错误,D 正确。
故选 D。
9. 某质点沿竖直方向做直线运动的位移 - 时间图像如图所示,以竖直向上为正方向,下列说法正确的是
某质点沿竖直方向做直线运动的位移 - 时间图像如图所示,以竖直向上为正方向,下列说法正确的是
A.该质点在 t3 时刻到达最高点
B.该质点在 0 ~ t1 时间内的速度大于在 t2 ~ t3 时间内的速度
C.在 t1 ~ t2 时间内,该质点的平均速度方向为正方向
D.在 t1 ~ t2 时间内,该质点始终处于失重状态
【答案】
D
【解析】
A.根据位移 - 时间图像可知,该质点在 t3 时刻回到出发点,故A错误;
B.位移 - 时间图像的斜率绝对值表示速度的大小,可知 0 ~ t1 时间内图像的斜率绝对值小于 t2 ~ t3 时间内的斜率绝对值,则该质点在 0 ~ t1 时间内的速度小于在 t2 ~ t3 时间内的速度,故 B 错误;
C.根据位移 - 时间图像可知,在 t1 ~ t2 时间内,质点的位移方向向下,则质点的平均速度方向向下,为负方向,故 C 错误;
D.根据位移 - 时间图像可知,在 t1 ~ t2 时间内,质点先向上做减速运动,再向下做加速运动,质点的加速度方向一直竖直向下,则该质点始终处于失重状态,故 D 正确。
故选 D。
10.为研究木板与物块之间的摩擦力,某同学在粗糙的长木板上放置一物块,物块通过细线连接固定在试验台上的力传感器,如图(a)。水平向左拉木板,传感器记录的 F – t 图像如图(b)。下列说法中不正确的是
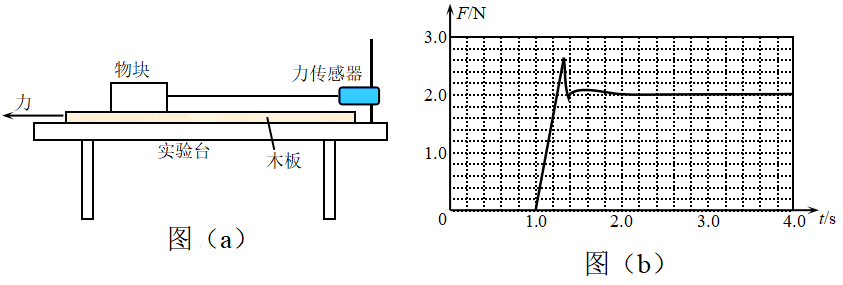
A.物块受到的摩擦力方向始终水平向左
B.1.0 ~ 1.3 s 时间内,木板与物块间的摩擦力大小与物块对木板的正压力成正比
C.1.0 ~ 1.3 s 时间内,物块与木板之间的摩擦力是静摩擦力
D.2.4 ~ 3.0 s 时间内,木板可能做变速直线运动
【答案】
B
【解析】
A.木板始终向左运动或者有向左运动的趋势,可得物块对木板的摩擦力始终向右,所以物块受到木板对其的摩擦力方向始终水平向左,A 正确;
BC.根据图像可得在 1.0 ~ 1.3 s 时间内物块受到摩擦力在变化,所以可得此时为静摩擦力,此时的静摩擦力大小与物块对木板的正压力无关,B 错误,C 正确;
D.2.4 ~ 3.0 s 时间内传感器示数不再变化说明此时摩擦力已经变为滑动摩擦力,此时木板只要运动就行,可能做变速直线运动,D 正确。
本题选不正确的,故选 B。
11. 如图所示,AB、CD 为一圆的两条直径且相互垂直。O 点为圆心,空间存在一未知静电场,方向与圆周所在平面平行。现有一电子,在电场力作用下,先从 A 点运动至 C 点,动能减少了 E;又从 C 点运动到 B 点,动能增加了 E,那么
如图所示,AB、CD 为一圆的两条直径且相互垂直。O 点为圆心,空间存在一未知静电场,方向与圆周所在平面平行。现有一电子,在电场力作用下,先从 A 点运动至 C 点,动能减少了 E;又从 C 点运动到 B 点,动能增加了 E,那么
A.A 到 C 电场力做正功,C 点电势 φC 高于 A 点 φA
B.C 到 B 电场力做正功,C 点电势 φC 高于 B 点 φB
C.该电场可能是匀强电场,电场线方向为 D 指向 C
D.该电场可能为正点电荷电场,且电荷处于 O 点
【答案】
C
【解析】
A.从 A 点运动至 C 点动能减少,所以电场力做负功;电势能增加,因为是电子带负电,所以可得 C 点电势 φC 低于 A 点 φA,A 错误;
B.同理 C 到 B 电场力做正功,动能增加,电势能减小,可得 C 点电势 φC 低于 B 点φB,B 错误;
C.根据前面分析可得 A、B 点电势能相同,电势相等,若是匀强电场,电场线垂直 AB 连线,又因为 C 点电势低于 A、B 两点,沿着电场线方向电势降低所以方向为 D 指向 C,C 正确;
D.若该电场为正点电荷电场,且电荷处于 O 点,可知 A、C 两点电势相同与题意不符,D 错误。
故选 C。
12. 一圆形线圈与一均匀的扁平条形磁铁同在一平面内,磁铁中央与圆心 O 重合.为了在磁铁开始运动时在线圈中得到一方向如图所示的感应电流 i,磁铁的运动方式应为
一圆形线圈与一均匀的扁平条形磁铁同在一平面内,磁铁中央与圆心 O 重合.为了在磁铁开始运动时在线圈中得到一方向如图所示的感应电流 i,磁铁的运动方式应为
A.使磁铁在线圈平面内绕 O 点沿逆时针方向转动
B.使磁铁沿垂直于线圈平面的方向向纸外做平动
C.使磁铁沿垂直于线圈平面的方向向纸内做平动
D.N 极向纸内,S 极向纸外,使磁铁绕 O 点转动
【答案】
D
【解析】
A.使磁铁在线圈平面内绕 O 点沿逆时针方向转动,穿过线圈的磁通量保持不变为零,不会产生感应电流,故 A 错误;
BC.使磁铁沿垂直于线圈平面的方向向纸外或向内做平动时,穿过线圈的磁通量仍然保持不变为零,不会产生感应电流,故 BC 错误;
D.图示时刻穿过线圈的磁通量为零,当 N 极向纸内,S 极向纸外,使磁铁绕 O 点转动时,使得穿过线圈的磁通量垂直纸面向里增大,根据楞次定律,可判断知在线圈中产生的感应电流为逆时针方向,故 D 正确。
故选D。
13.用 2×106 Hz的超声波检查胆结石,该超声波在结石和胆汁中的波速分别为 2 250 m/s 和 1 500 m/s,则该超声波在结石中的波长是胆汁中的______倍。用超声波检查胆结石是因为超声波的波长较短,遇到结石时_______(选填“容易”或“不容易”)发生衍射。
【答案】
1.5,不容易
【解析】
根据 λ =
14. 在高度 180 m 处有两只气球(气球 a 和气球 b),以相同速度 10 m/s 分别匀速上升和匀速下降,此时,在这两只气球上各掉出一物体,则这两个物体落到地面时的时间差_______s,所经过的路程差_________m。(物体空气阻力不计)
在高度 180 m 处有两只气球(气球 a 和气球 b),以相同速度 10 m/s 分别匀速上升和匀速下降,此时,在这两只气球上各掉出一物体,则这两个物体落到地面时的时间差_______s,所经过的路程差_________m。(物体空气阻力不计)
【答案】
2,10
【解析】
(1)根据题意可得气球 a 上掉出的物体先做竖直上抛运动,当回到初始位置时以同样大小的速度向下做匀加速直线运动,气球 b 掉出的物体从掉出后就开始向下做匀加速直线运动,所以可得两个物体落到地面时的时间差即为气球 a 上掉出的物体从掉出到回到掉出位置时的时间,即 Δv = 2×
(2)同理所经过的路程差为气球 a 上掉出的物体从掉出到回到掉出位置时经过的路程,即
Δs = 2×
15.天舟五号货运飞船通过两次变轨抬升轨道高度,实现与空间站组合体共轨,创造了两小时自主交会对接的世界纪录,若将其变轨前后稳定运行时的运动近似为匀速圆周运动,则变轨后运行速度__________(选填“变大”、“变小”或“不变”),对接后组合体运行周期为 90 分钟,则组合体的角速度约为_________rad/s。(用科学计数法表示,保留到小数点后两位)
【答案】
变小,1.16×10−3
【解析】
(1)设地球质量为 M,天舟五号货运飞船质量为 m,运行半径为 r,根据万有引力提供向心力可得
所以当变轨抬升轨道高度后运行半径增大,运行速度变小。
(2)组合体的角速度约为 ω =
16. 如图,倾角为 θ 的光滑斜面固定在水平地面,与斜面平行的轻质绝缘细线上端固定在斜面顶端,下端系质量为 m、电荷量为 q 的小球 A。A 右侧等高处固定带等量同种电荷的小球 B,若 AB 间距为
如图,倾角为 θ 的光滑斜面固定在水平地面,与斜面平行的轻质绝缘细线上端固定在斜面顶端,下端系质量为 m、电荷量为 q 的小球 A。A 右侧等高处固定带等量同种电荷的小球 B,若 AB 间距为
【答案】
【解析】
(1)由点电荷场强公式可得
E =
解得 B 在 A 处激发的电场强度大小 E =
 (2)小球 A 受力分析如图所示。小球所受合力为零,垂直斜面方向
(2)小球 A 受力分析如图所示。小球所受合力为零,垂直斜面方向
N = mgcosθ + Eqsinθ = mgcosθ + mgtanθsinθ =
由牛顿第三定律,斜面受到 A 的压力大小为
17. 四根平行的通电长直导线,其横截面恰好在一个边长为 L 的正方形的四个顶点上,电流方向如图,其中 A、C 导线中的电流大小为 I1,B、D 导线中的电流大小为 I2。若通电长直 导线产生的磁场中某点的磁感应强度满足 B = k
四根平行的通电长直导线,其横截面恰好在一个边长为 L 的正方形的四个顶点上,电流方向如图,其中 A、C 导线中的电流大小为 I1,B、D 导线中的电流大小为 I2。若通电长直 导线产生的磁场中某点的磁感应强度满足 B = k
【答案】
0,2∶1
【解析】
(1)根据磁场的矢量合成法则,B、D 导线在 O 处的合磁感应强度为零,A、C 导线在 O 处的合磁感应强度也为零,所以 O 处的磁感应强度大小为 0。
(2)B 导线在 A 处的磁场方向竖直向下,D 导线在A处的磁场方向水平向左,可得 B、D 导线在 A 处的合磁感应大小为 B1 =
C 导线在 A 处的磁感应大小为 B2 = k
若 A 导线所受的磁场力恰好为零,可得此处磁感应强度为零,可得 B1 = B2,即
18.如图(a)所示为“用 DIS 测电源的电动势和内电阻”的部分实验电路图,电流传感器有微小电阻,图乙是某同学实验中得到的 U – I 图线。
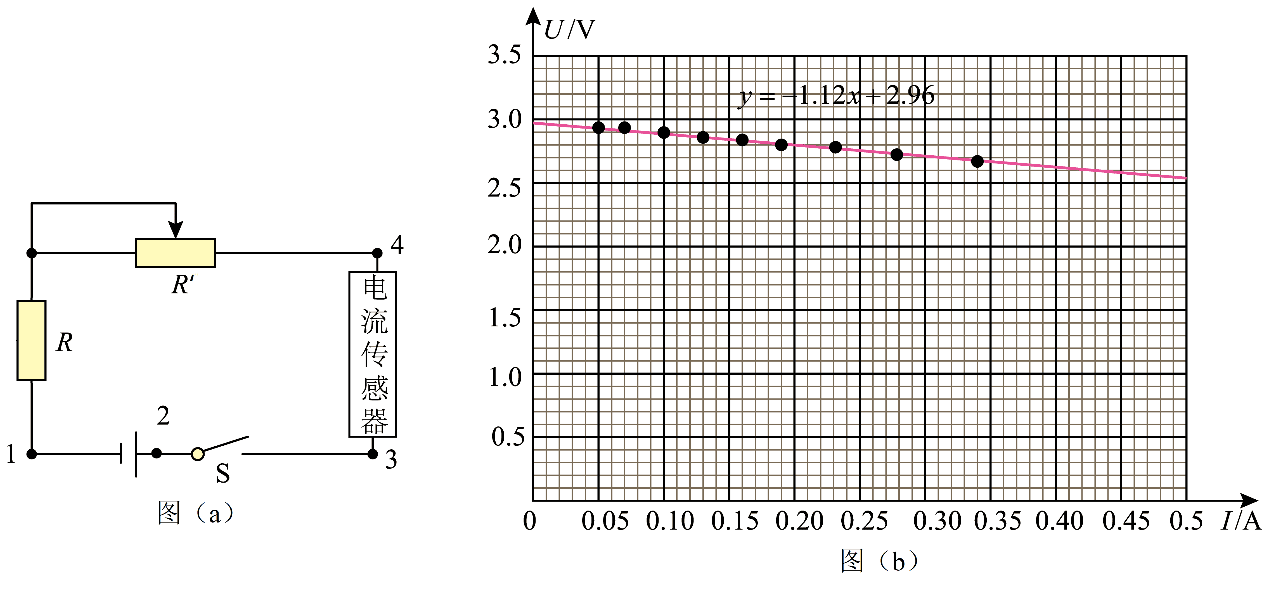
(1)实验中还需要_________传感器,其接线应接在图(a)电路中的“1”和_______位置(“2、3、4”中选填);
(2)由图(b)实验图线的拟合方程 y = − 1.12x + 2.96 可得,该电源电动势 E = _________V,内阻r = _________Ω;
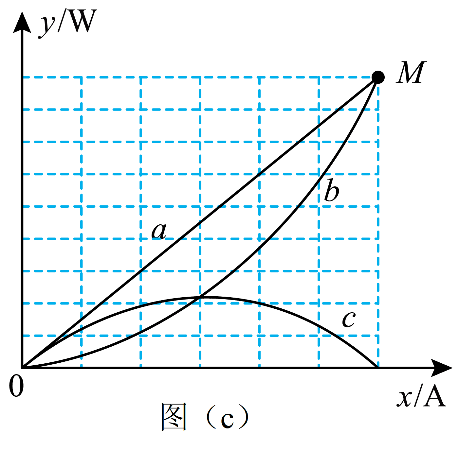 (3)根据实验测得的 I、U 数据,若令 y = IU,x = I 则由计算机拟合得出的 y – x 图线应是图(c)中的________(选填“a”、“b”或“c”),其余两条图线分别是令 y = IE,y = I2r 得出的;
(3)根据实验测得的 I、U 数据,若令 y = IU,x = I 则由计算机拟合得出的 y – x 图线应是图(c)中的________(选填“a”、“b”或“c”),其余两条图线分别是令 y = IE,y = I2r 得出的;
(4)由第(2)问中得到的电源电动势和内阻的值,推测图丙中 M 点的坐标为___________。(保留到小数点后面2位)
【答案】
(1)电压,3
(2)2.96,1.12
(3)c
(4)(2.64,7.82)
【解析】
(1)实验中还需要电压传感器测路端电压。开关要起到作用,所以不能接在 2;电流传感器有微小电阻,要正确测量端电压,不能接在 4。电压传感器接线应分别接在图(a)电路中 1 和 3 位置。
(2)根据闭合电路欧姆定律 U = E – Ir。由图(b)实验图线的拟合方程可得,图像纵坐标的截距表示电源电动势,则有 E = 2.96 V,斜率的绝对值表示电源的内阻,则有 r = 1.12 Ω。
(3)若令 y = IU、x = I 则由计算机拟合得出的 y – x 图线应是电源的输出功率与干路电流的关系,由于电源的输出功率随外电阻的增大是先增大后减小,当外电阻等于电源内阻时输出功率最大,所以该图线应是 c。
(4)M 是电路的状态是外电阻为 0,此时 ym =
19.如图(a)所示,一根足够长的细杆与水平成 θ = 37° 固定,质量为 m = 1 kg 的小球穿在细杆上静止于细杆底端 O 点,水平向右的 F 作用于小球上,经时间 t1 = 0.2 s 后停止作用,小球沿细杆运动的部分 v – t 图像如图(b)所示(取 g = 10 m/s2,sin37° = 0.6,cos37° = 0.8)。求:

(1)小球在 0 ~ 0.2 s 内的加速度 a1 和 0.2 ~ 0.4 s 内的加速度 a2;
(2)小球与细杆之间的动摩擦因数 μ;
(3)0 ~ 0.2 s 内水平作用力 F 的大小;
(4)试分析小球是否可以返回 O 点?说明原因。
【答案】
(1)a1 = 20 m/s2,a2 = − 10 m/s2
(2)μ = 0.5
(3)F = 60 N
(4)能够返回到 O 点
【解析】
(1)根据 a =
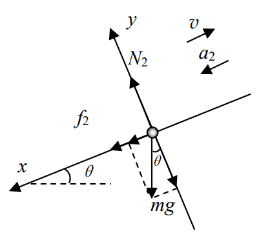 (2)0.2 ~ 0.4 s,小球受力如图:
(2)0.2 ~ 0.4 s,小球受力如图:
mgsin37° + μN2 = ma2
N2 – mgcos37° = 0
解得:μ = 0.5
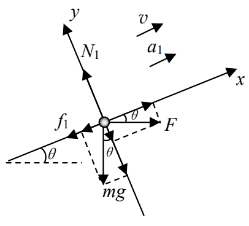 (3)0 ~ 0.2 s,小球受力如图:
(3)0 ~ 0.2 s,小球受力如图:
Fcos37° − mgsin37° − μN1 = ma1
N1 – mgcos37° + Fsin37° = 0
解得 F = 60 N
(4)mgsinθ = 6 N > f静max = μmgcosθ = 4 N,小球上升到最高点后会沿杆加速下滑
所以小球能够返回到 O 点
20.发电机和电动机具有装置上和机理上的类似性。直流发电机和直流电动机的工作原理可以简化为如图(a)、图(b)所示的情景。

在竖直向下的磁感应强度为 B 的匀强磁场中,两根光滑平行金属轨道 MN、PQ 固定在水平面内,相距为 L,电阻不计.电阻为 R 的金属导体棒 ab 垂直于 MN、PQ 放在轨道上,与轨道接触良好,以速度 v(v 平行于 MN)向右做匀速运动。
图(a)轨道端点 MP 间接有阻值为 r 的电阻,导体棒 ab 受到水平向右的外力作用。图(b)轨道端点 MP 间接有直流电源,内阻为 r,导体棒 ab 通过光滑滑轮匀速提升重物,电路中的电流为 I。
(1)求图(a)、图(b)中,金属棒两端 a、b 两点间的电压;
(2)求在 Δt 时间内,图(a)“发电机”产生的电能 E1 和图(b)“电动机”输出的机械能 E2;
(3)分析 Δt 时间内,图(a)和图(b)中能量转化的过程。
【答案】
(1)图(a):Uab =
图(b):Uab = IR + BLv
(2)图(a):E1 =
图(b):E2 = BILvΔt
(3)图(a):外界能量 E1,通过外力 F 做功,进入系统;通过克服 FA 做功转化为电能;通过电流做功转化为 R 和 r 上的焦耳热。
图(b):电源提供的电能 E2 + I2(R + r)Δt,其中 I2(R + r)Δt 通过电流做功转化为 R 和 r 上的焦耳热;其中 E2 通过安培力 FA 做功,绳子的拉力做功转化为重物的重力势能/机械能。
【解析】
(1)图(a): E = Blv
I =
Uab = Ir =
图(b):能量守恒:UabI = I2R + mgv
导体棒与重物均匀速运动,可得 mg = T = FA = BIL
Uab = IR + BLv
(2)图(a):E1 = EIΔt = BLv·
图(b):E2 = P机∙∆t = mgv∙∆t
由导体棒与重物均匀速运动,可得 mg = T = FA = BIL
E2 = BILvΔt
(3)图(a):
 ab 棒受力如图,因为匀速,F = FA
ab 棒受力如图,因为匀速,F = FA
外界能量 E1,通过外力 F 做功,进入系统;通过克服 FA 做功转化为电能;通过电流做功转化为 R 和 r 上的焦耳热。
图(b):
电源提供的电能 E2 + I2(R + r)Δt;其中 I2(R + r)Δt 通过电流做功转化为 R 和 r 上的焦耳热;其中 E2 通过安培力 FA 做功,绳子的拉力做功转化为重物的重力势能/机械能。
2006 - 2025,推荐分辨率 1024*768 以上,推荐浏览器 Chrome、Edge 等现代浏览器,截止 2021 年 12 月 5 日的访问次数:1872 万 9823。 站长邮箱
