虹口区2022学年第一学期期末
- 下载
- 2022/12/20
- 169 次
- 2595 K
1.下列物理量中属于矢量的是( )
A.振幅 B.周期 C.功率 D.加速度
【答案】
D
2.爱因斯坦在物理学中的重要贡献有( )
A.发现万有引力定律 B.建立狭义相对论
C.首次测定元电荷的电荷量 D.最早发现电磁感应现象
【答案】
B
3.在国际单位制(SI)中,“电势”用基本单位可以表示为 ( )
A.kg·m2·s−2 B.kg·m·C−1 C.kg·m2·A−1·s−3 D.kg·m2·C−1·s−3
【答案】
C
4.关于电动势和电压的理解,下列说法正确的是( )
A.电源两极间的电压就是电源的电动势
B.家用 5 号干电池的电动势大于 7 号干电池的电动势
C.两者单位都是伏特,故电动势与电压属于同一物理量
D.电动势的大小反映电源把其它形式能量转化为电能的本领
【答案】
D
5.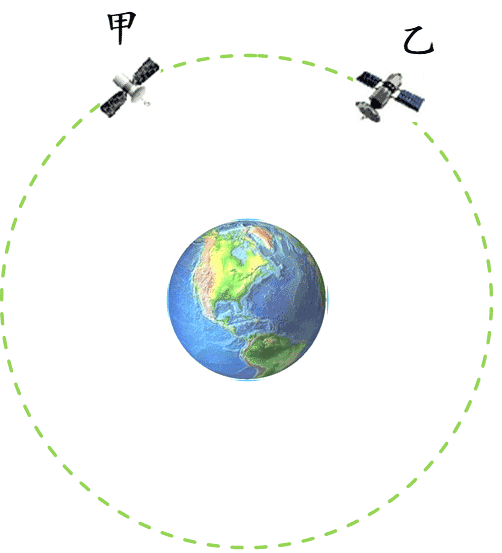 如图,甲、乙两颗人造地球卫星在同一圆形轨道上绕地球运行,则两颗卫星( )
如图,甲、乙两颗人造地球卫星在同一圆形轨道上绕地球运行,则两颗卫星( )
A.动能一定相同
B.周期一定相同
C.加速度一定相同
D.受地球的引力一定相同
【答案】
B
6.从某高处释放一粒小石子,经过 2 s 从同一地点再释放另一粒小石子。不计空气阻力,落地前,两粒石子间的距离将( )
A.保持不变 B.不断减小 C.不断增大 D.先增大后减小
【答案】
C
7. 宇航员在图示的天宫空间站内将冰墩墩抛出,则( )
宇航员在图示的天宫空间站内将冰墩墩抛出,则( )
A.冰墩墩处于完全失重状态,是因为其不受重力
B.冰墩墩在飞行过程中,所受外力的合力不为零
C.冰墩墩在飞行过程中,因为不受力,所以做匀速直线运动
D.抛掷瞬间,宇航员对冰墩墩的作用力大于冰墩墩对宇航员的作用力
【答案】
B
8.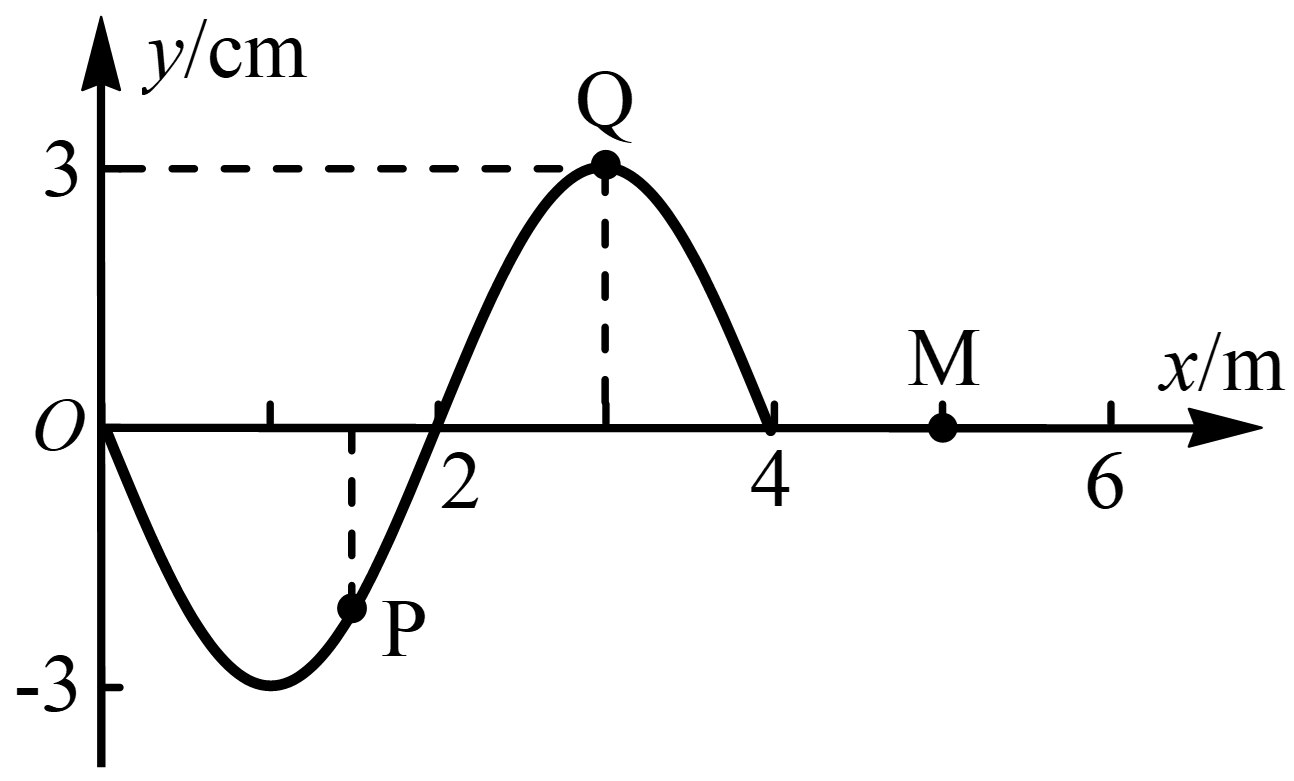 图示为 t = 0时刻的波形图,波速 v = 2 m/s。从图示时刻开始,质点 Q 领先于质点 P 到达平衡位置。则( )
图示为 t = 0时刻的波形图,波速 v = 2 m/s。从图示时刻开始,质点 Q 领先于质点 P 到达平衡位置。则( )
A.波沿 x 轴负方向传播
B.质点 P 的振动周期 T = 4 s
C.t = 1.5 s 时,质点 P 和 Q 均沿 y 轴正方向运动
D.t = 0 到 1.5 s 的时间内,质点 M 通过的路程为 6 cm
【答案】
D
9.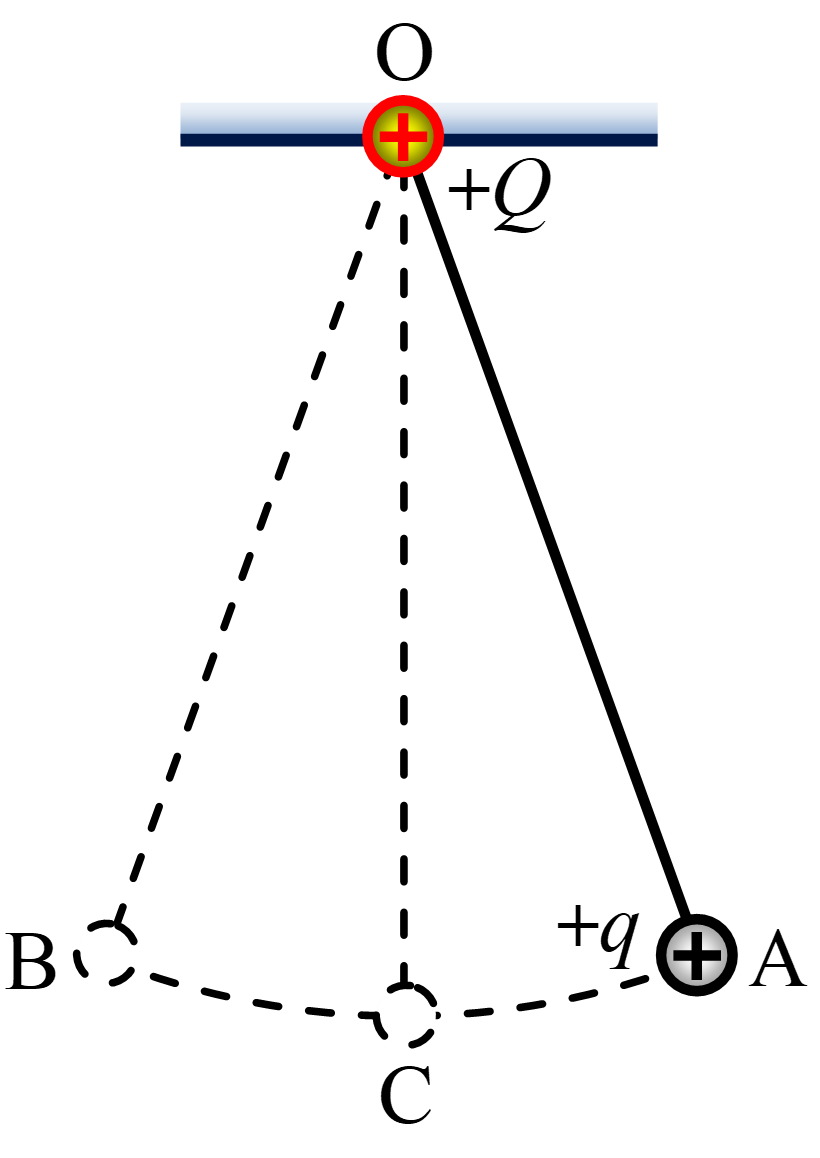 如图,O 点固定一个点电荷 + Q,绝缘细线将另一带电小球 + q 悬挂于 O 点。将小球 + q 轻轻拉至 A 点,由静止释放后,小球在 A、B 间做小幅摆动,不计空气阻力。当小球 + q 向左经过最低点 C 时,迅速移走点电荷 + Q,则( )
如图,O 点固定一个点电荷 + Q,绝缘细线将另一带电小球 + q 悬挂于 O 点。将小球 + q 轻轻拉至 A 点,由静止释放后,小球在 A、B 间做小幅摆动,不计空气阻力。当小球 + q 向左经过最低点 C 时,迅速移走点电荷 + Q,则( )
A.摆动周期减小
B.小球仍能到达 B 点
C.再次经过 C 点时,小球的速度大于此前经过 C 点时的速度
D.再次经过 C 点时,细线的张力大于此前经过 C 点时的张力
【答案】
B
【解析】
选项 AB:由于带电小球之间的库仑力始终沿绳方向,对圆弧切线方向的回复力没有影响,因此单摆的周期、振幅都不会发生变化。选项 A 错误、B 正确;
选项 C:库仑力始终垂直于运动方向,不做功,小球的机械能仍然不变,经过 C 的速度大小也不变;
选项 D:在最低点 C,沿绳方向原来有一个向下的库仑斥力,移走电荷后此力消失,导致细线的拉力变小。选项 D 错误。
正确选项为 B。
10.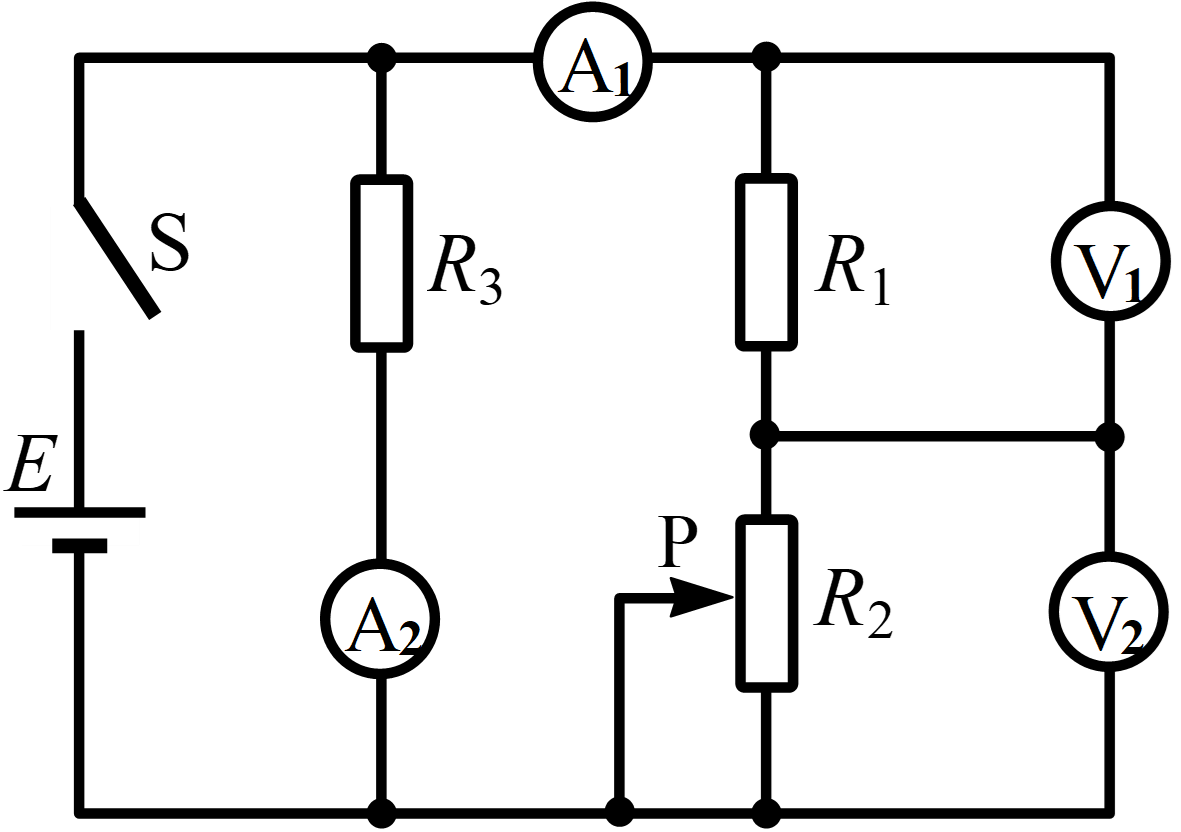 图示电路中,电源电动势为 E,内阻不计。闭合开关 S,滑动头 P 由中点向下移动的过程中,电表 A1、V1、V2 示数变化的大小分别为 ΔI1、ΔU1、ΔU2,则( )
图示电路中,电源电动势为 E,内阻不计。闭合开关 S,滑动头 P 由中点向下移动的过程中,电表 A1、V1、V2 示数变化的大小分别为 ΔI1、ΔU1、ΔU2,则( )
A.A1 示数减小、A2 示数增大
B.A1 示数减小,A2 示数不变
C.
D.
【答案】
B
【解析】
选项 AB:滑片向下移动的过程中,R2 变大,总电阻变大,干路电流 I 变小;由于内阻不计,端电压 U 不变,因此通过 R3 的电流 I3 不变,即 A2 示数不变;而通过 R1 的电流 I1 = I – I3 可知 A1 的示数减小。选项 A 错误,B 正确;
选项 CD:
正确选项为 B。
11.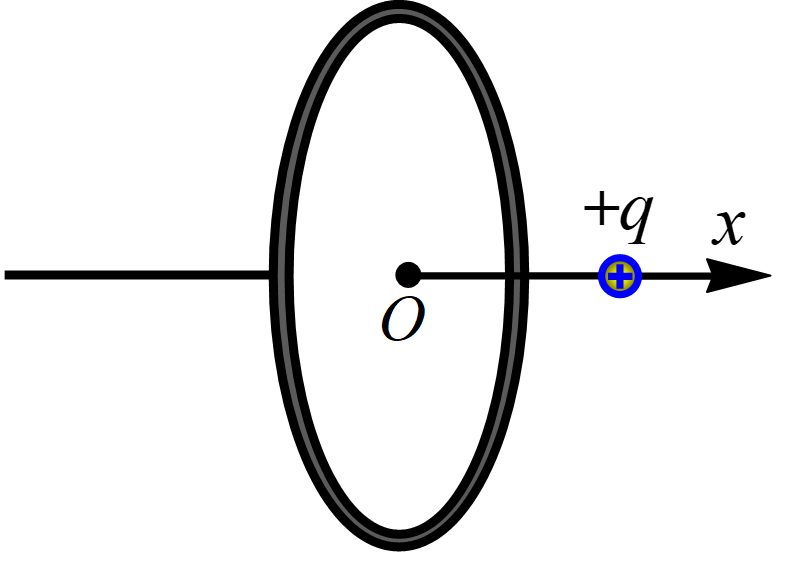 如图,圆环均匀带正电,沿其中心轴线建立 x 轴。将另一点电荷 + q 从圆心 x = 0 处沿 x 轴正方向移到无穷远处的过程中,电场力做功为 W0。取无穷远处为电势能零点,则电荷 + q 具有的电势能 Ep 与位置坐标 x 的关系图像正确的是( )
如图,圆环均匀带正电,沿其中心轴线建立 x 轴。将另一点电荷 + q 从圆心 x = 0 处沿 x 轴正方向移到无穷远处的过程中,电场力做功为 W0。取无穷远处为电势能零点,则电荷 + q 具有的电势能 Ep 与位置坐标 x 的关系图像正确的是( )
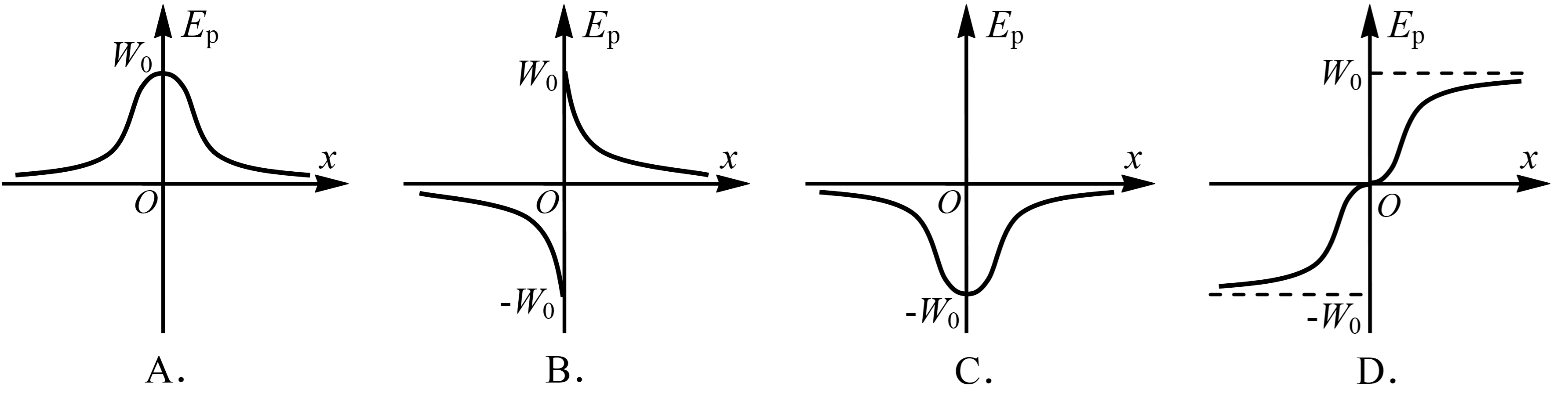
【答案】
A
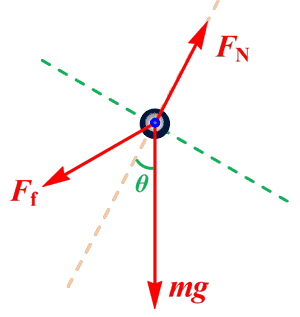
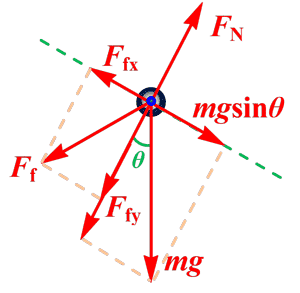
12.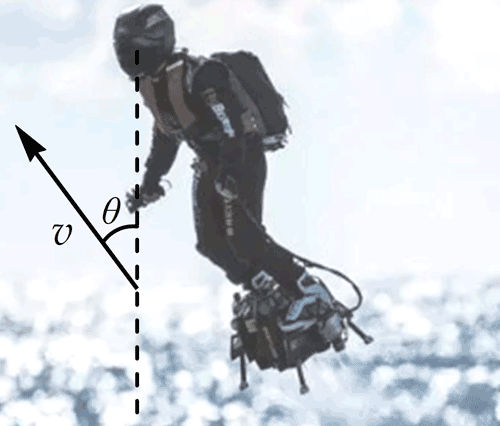 如图,飞行员通过手柄控制推力 F 的大小和方向,可以改变单人滑板式飞行器在空中的飞行方向和速度。调节推力 F,使飞行器沿与竖直成 θ 角的方向匀速飞行(θ < 90°),飞行员受到空气的阻力与其速度成正比,则( )
如图,飞行员通过手柄控制推力 F 的大小和方向,可以改变单人滑板式飞行器在空中的飞行方向和速度。调节推力 F,使飞行器沿与竖直成 θ 角的方向匀速飞行(θ < 90°),飞行员受到空气的阻力与其速度成正比,则( )
A.推力 F 沿飞行方向指向左上方
B.飞行方向不变,速度越大,推力 F 与竖直方向夹角越小
C.若保持推力 F 方向不变,匀速飞行的速度较大时,θ 角较小
D.若保持推力 F 大小不变,匀速飞行的速度较大时,θ 角较小
【答案】
C
【解析】
 由于飞行器匀速飞行,则它在其重力 G、空气阻力 f、推力 F 作用下处于受力平衡状态,受力情况如图所示。
由于飞行器匀速飞行,则它在其重力 G、空气阻力 f、推力 F 作用下处于受力平衡状态,受力情况如图所示。
A.由受力图可知推力 F 并不沿飞行方向。选项 A 错误;
B.速度越大,空气阻力 f 越大,由图可知,F 与竖直方向的夹角越大。选项 B 错误;
C.由图可知,速度较大时 f 也较大,即图中对应 f 的邻边变长,要使对应 F 的对角线方向不变,此邻边应顺时针旋转,即 v 方向顺时针旋转,θ 变小。选项 C 正确。
D.由图可知,速度较大时对应 f 的邻边变长,要使对应 F 的对角线长度不变,应使 θ 变大。选项 D 错误。
13.静电场是________________周围空间存在的一种物质;描述电场力的属性和能的属性的物理量分别为_________________、_________________。
【答案】
静止电荷,电场强度、电势
14.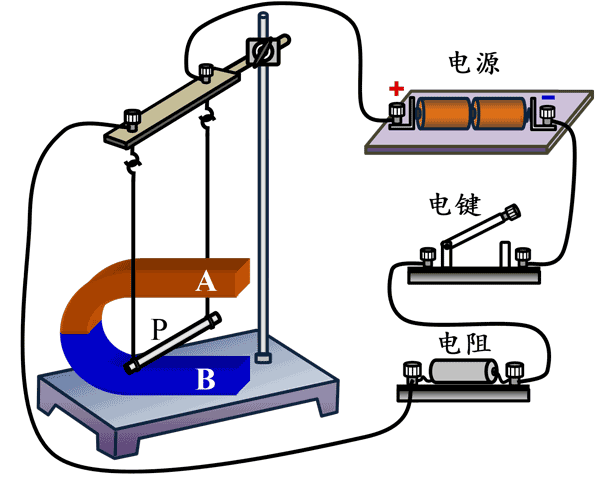 图示为研究左手定则的实验装置图。闭合电键,铜棒 P 向右摆动,则 U 型磁铁的 A 端为________极(选填“N”或“S”)。铜棒 P 从静止开始起,第一次到达右侧最高点的过程中,不计空气阻力,其机械能________________(选填“增大”、“减小”、“先增后减”、“先减后增”)。
图示为研究左手定则的实验装置图。闭合电键,铜棒 P 向右摆动,则 U 型磁铁的 A 端为________极(选填“N”或“S”)。铜棒 P 从静止开始起,第一次到达右侧最高点的过程中,不计空气阻力,其机械能________________(选填“增大”、“减小”、“先增后减”、“先减后增”)。
【答案】
N,增大
15. 跳水比赛中,运动员向上离开踏板的瞬间为计时起点,竖直向上为正方向。运动员可看做质点,其竖直方向的速度 v 与时间 t 的关系如图所示,则运动员到达最高点的时刻为___________,踏板距离水面的高度为_________m。
跳水比赛中,运动员向上离开踏板的瞬间为计时起点,竖直向上为正方向。运动员可看做质点,其竖直方向的速度 v 与时间 t 的关系如图所示,则运动员到达最高点的时刻为___________,踏板距离水面的高度为_________m。
【答案】
0.5 s,10
16.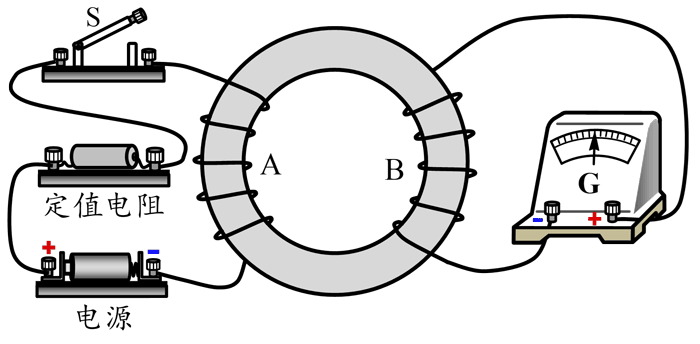 图示为研究电磁感应现象的实验装置图,A、B 是套在同一圆形铁芯上的两个线圈。事先已经探明:电流从正极流入灵敏电流计 G 时,指针向右偏转。现将电键 S 闭合,再稳定一段时间,观察到电流计的指针先______________,最后回到中间位置不动。指针回到中间不再偏转的原因是:_________________________________________________________________。
图示为研究电磁感应现象的实验装置图,A、B 是套在同一圆形铁芯上的两个线圈。事先已经探明:电流从正极流入灵敏电流计 G 时,指针向右偏转。现将电键 S 闭合,再稳定一段时间,观察到电流计的指针先______________,最后回到中间位置不动。指针回到中间不再偏转的原因是:_________________________________________________________________。
【答案】
向左偏转。电路接通稳定后,线圈 A 产生磁场虽然最强但恒定不变,穿过线圈 B 的磁通量最大但不变,感应电流消失,电流计的指针不再偏转。
17. 图(甲)中,粗糙程度相同的斜面固定在地面上,将小物块从斜面顶端由静止释放,经 6 s 匀加速下滑到底端。图(乙)中的 ①、② 两条曲线分别表示该过程重力、摩擦力对物块做功随时间的变化关系,虚线 AB 为 t = 6 s 时曲线 ① 的切线,则切线 AB 斜率的物理意义是___________________________________。以地面为重力势能零势能面,当物块重力势能 Ep = 9 J 时,其动能 Ek = _______J。
图(甲)中,粗糙程度相同的斜面固定在地面上,将小物块从斜面顶端由静止释放,经 6 s 匀加速下滑到底端。图(乙)中的 ①、② 两条曲线分别表示该过程重力、摩擦力对物块做功随时间的变化关系,虚线 AB 为 t = 6 s 时曲线 ① 的切线,则切线 AB 斜率的物理意义是___________________________________。以地面为重力势能零势能面,当物块重力势能 Ep = 9 J 时,其动能 Ek = _______J。
【答案】
t = 6 s 时重力的瞬时功率(答“t = 6 s 时重力势能的变化率”、“t = 6 s 时重力势能变化的快慢”的,同样给分),6
【解析】
(1)由 P =
(2)由图可知,小物块从顶端滑至底端,重力做功 18 J,克服摩擦力做功 6 J。当重力势能为 9 J 时,即物块滑至斜面中点。由 WG = mgsinθ·s、Wf = − fs 可知,WG 与 Wf 成正比关系,因此物块滑至斜面中点的过程中,重力做功 9 J,克服摩擦力做功应为 3 J,根据动能定理可知此时刻动能为 6 J。
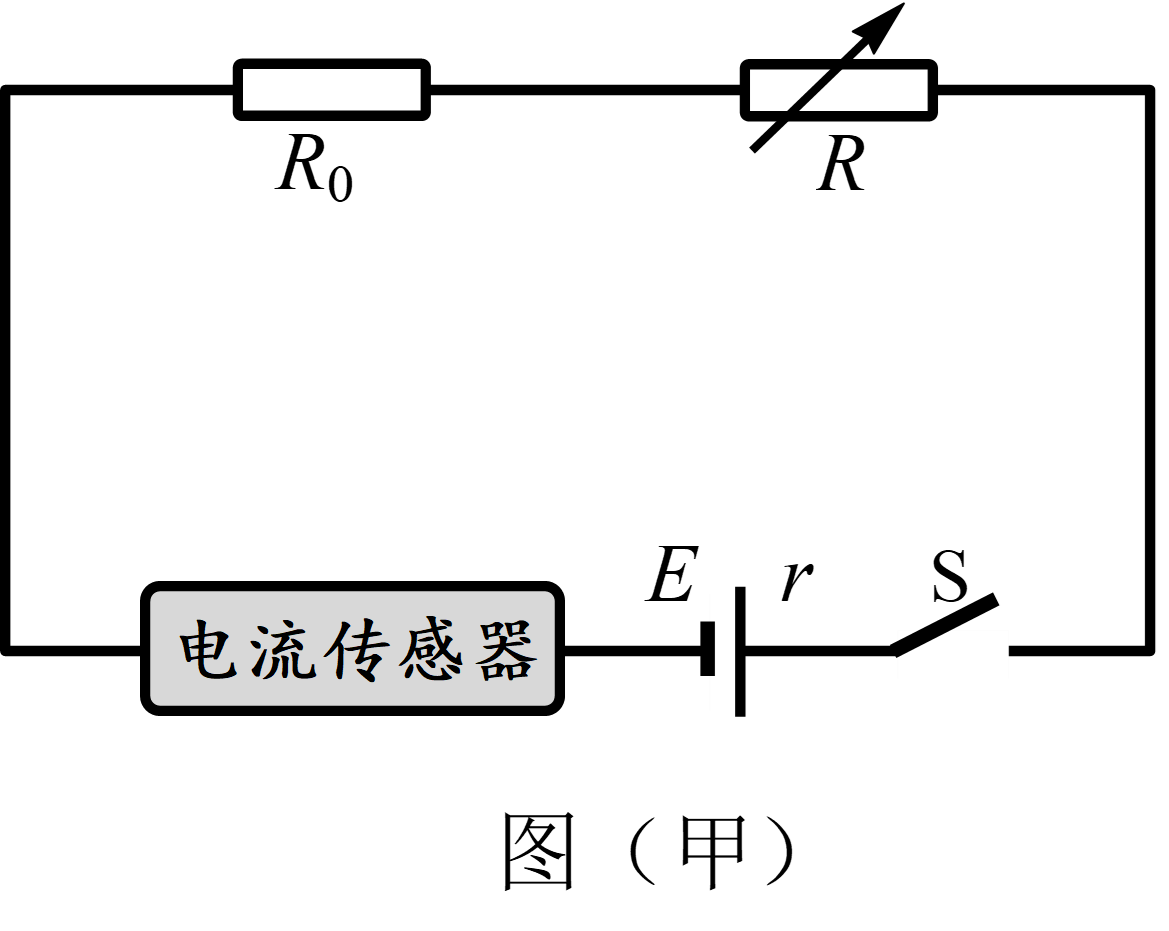
18.在“用 DIS 测量电源的电动势和内阻”的实验中,A 同学将待测电源、电阻箱 R、阻值为 6 Ω 的定值电阻 R0、电流传感器连成图(甲)所示的电路。
(1)B 同学认为:R0 阻值太小,可以去掉。你___________B 同学的观点(选填“赞同”、“不赞同”),理由是:_____________________________________。
(2)A 同学实验时,调整电阻箱的阻值,记录多组电阻箱的阻值 R 和电流传感器示数 I,在计算机上绘出
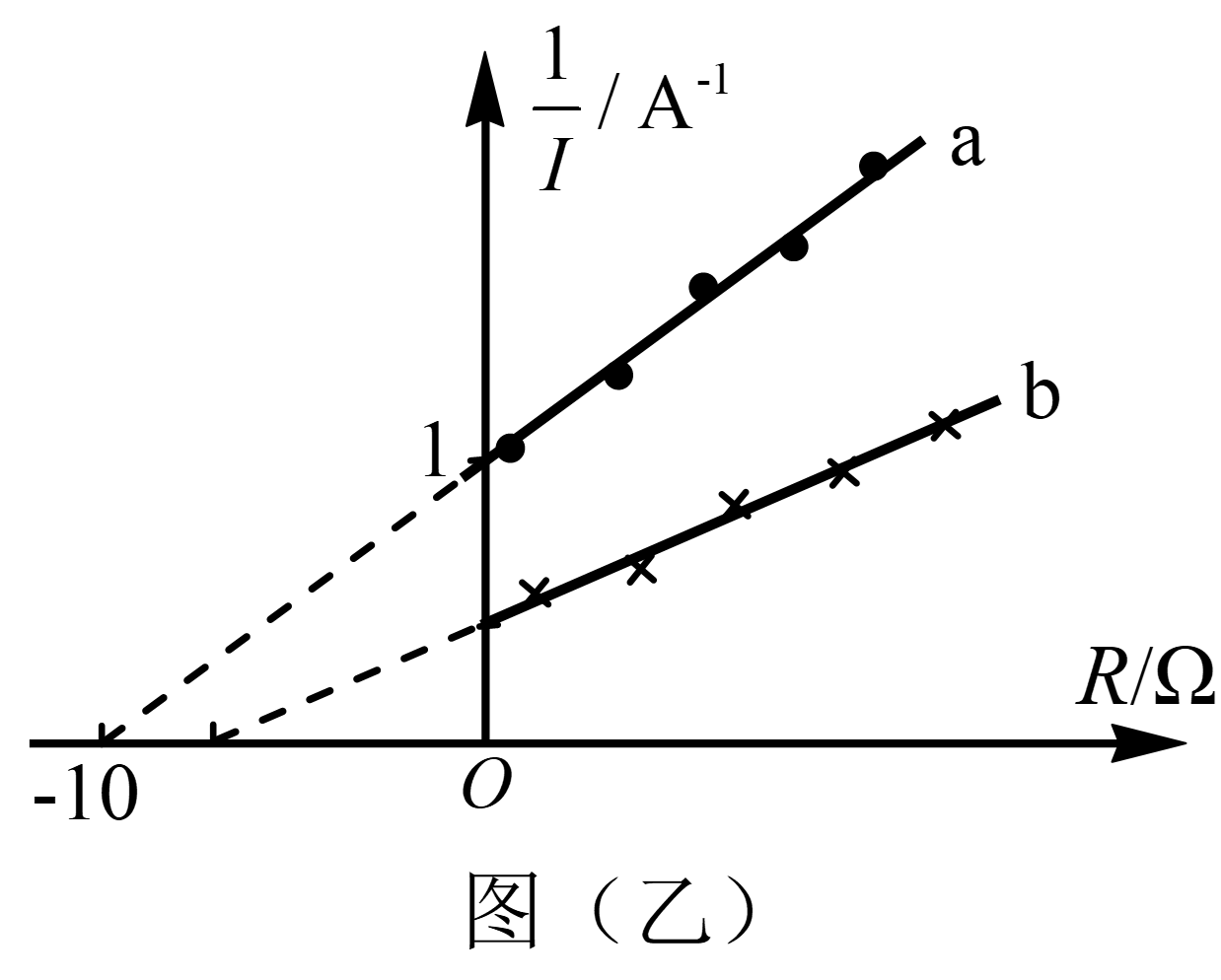
①不计电流传感器的内阻,依据图线可知,电源 a 的电动势 Ea = _________V,内阻 ra = _______Ω。
②若将定值电阻 R2 分别与电源 a、b 连接,则 R2 两次消耗的功率 Pa_______Pb(选填“大于”、“等于”或“小于”)。
【答案】
(1)不赞同。若无 R0,调节 R 的过程中,电源可能被短路,损坏电源或电流传感器。
(2)① 10 V,4 Ω;
② 小于
19.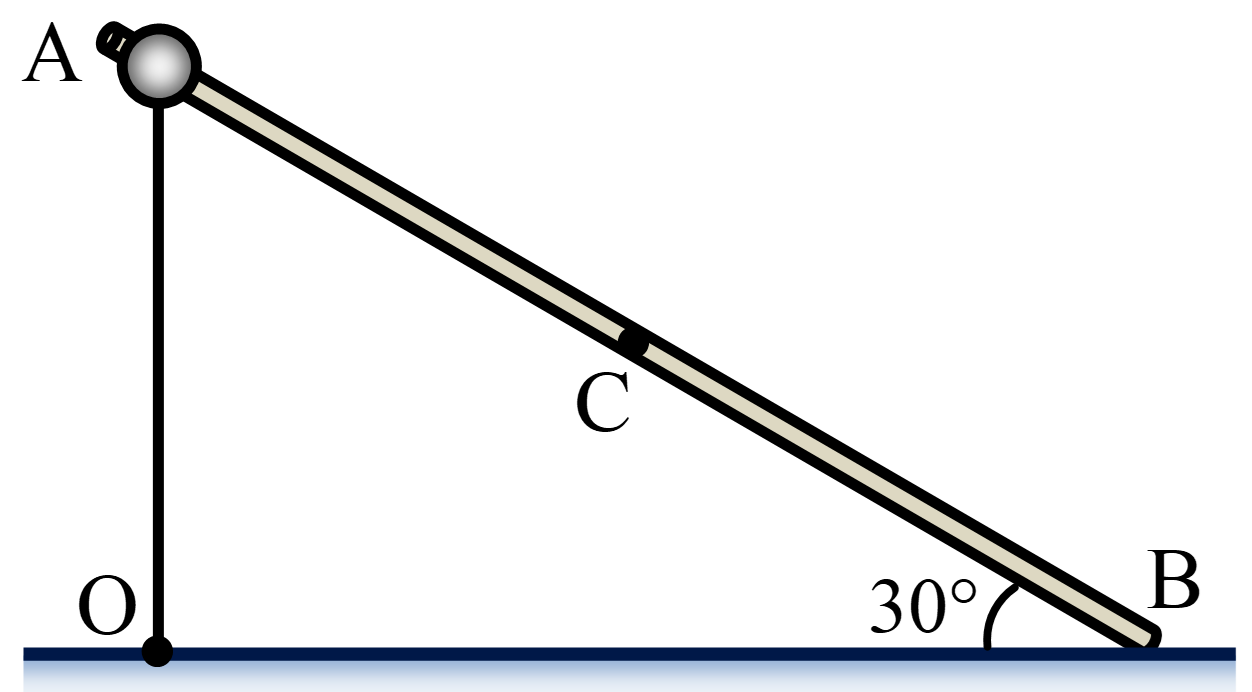 如图,长度为 2l 的光滑直杆 AB 固定在水平地面,与水平面的夹角 θ = 30°,质量为 m 的小球套在杆上。原长为 l 的轻质橡皮筋下端固定在 A 点正下方的 O 点,上端与球相连。将小球从 A 点由静止释放,运动到底端 B 时速度恰为零,橡皮筋始终在弹性限度内,重力加速度为 g。求:
如图,长度为 2l 的光滑直杆 AB 固定在水平地面,与水平面的夹角 θ = 30°,质量为 m 的小球套在杆上。原长为 l 的轻质橡皮筋下端固定在 A 点正下方的 O 点,上端与球相连。将小球从 A 点由静止释放,运动到底端 B 时速度恰为零,橡皮筋始终在弹性限度内,重力加速度为 g。求:
(1)运动到杆的中点 C 时,小球速度 vC 的大小;
(2)运动到杆的中点 C 时,小球重力的功率 PG;
(3)请分析说明:小球从 A 到 B 的过程中,其动能是如何变化的?
【答案】
(1)vC =
(2)PG =
(3)动能先增大后减小
【解析】
(1)因 OC = OA,故小球运动到 C 点之前的过程中,橡皮筋处于松弛状态,其弹力为零,
机械能守恒:mglsinθ =
解出:vC =
(2)重力的瞬时功率 PG = mgvCsinθ =
(3)A 到 C 的过程中:
橡皮筋弹力为零,小球仅受重力、支持力,匀加速下滑,动能增大;
C 到 B 的过程中:
小球受重力 mg、支持力 FN、橡皮筋弹力 Ff 的作用,如图。
橡皮筋弹力 Ff 逐渐增大,沿杆向上的分力 Ffx 逐渐增大,
最初,Ffx ≤ mgsinθ,合外力沿杆向下,继续加速向下运动,动能增大;
此后,Ffx > mgsinθ,合外力沿杆向上,减速运动,动能减小;
故 A 到 B 的过程中,小球的动能先增大后减小。
20.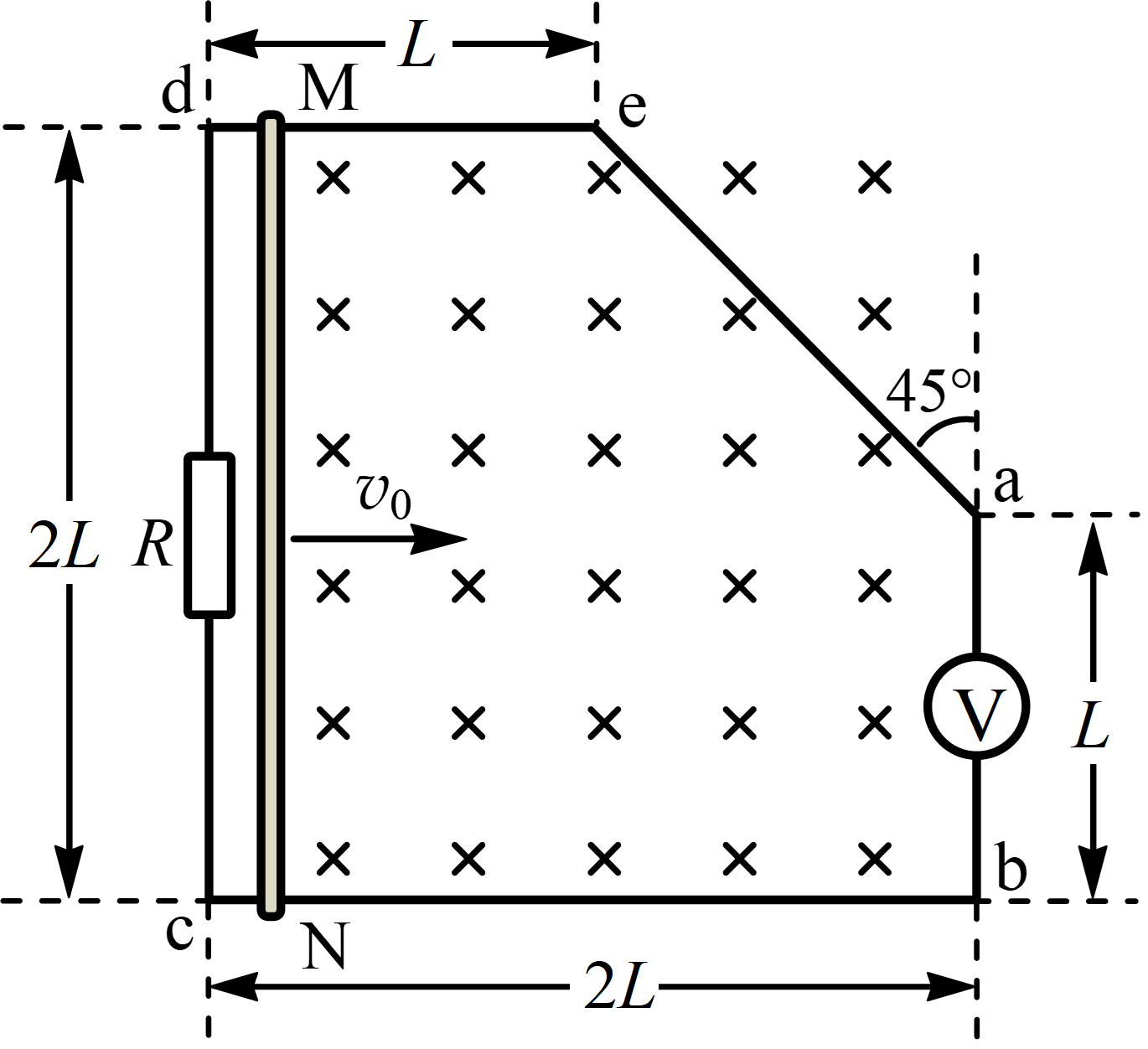 光滑金属框架 abcde 置于水平面内,∠b = ∠c = ∠d = 90°,各边长度如图所示。Cd 边接入阻值为 R 的定值电阻,ab 边接入电压表 V,导体棒 MN 平行于 cd,不计框架与导体棒的电阻。匀强磁场垂直于框架平面,磁感应强度大小为 B。在外力作用下,MN 沿框架以初始速度 v0 从靠近 cd 的位置向右运动,导体棒始终与 bc 垂直且接触良好。MN 运动到 ab 之前的过程中,电压表的示数恒为 U。
光滑金属框架 abcde 置于水平面内,∠b = ∠c = ∠d = 90°,各边长度如图所示。Cd 边接入阻值为 R 的定值电阻,ab 边接入电压表 V,导体棒 MN 平行于 cd,不计框架与导体棒的电阻。匀强磁场垂直于框架平面,磁感应强度大小为 B。在外力作用下,MN 沿框架以初始速度 v0 从靠近 cd 的位置向右运动,导体棒始终与 bc 垂直且接触良好。MN 运动到 ab 之前的过程中,电压表的示数恒为 U。
(1)试从功和能量转化关系的角度证明:MN 在 d、e 之间运动的过程中,切割磁感线产生的电动势 E = 2BLv0;
(2)若定义“另类加速度”为通过单位位移内的速度改变量,用公式表示为 A =
(3)MN 由 cd 向右运动到 ab 的过程中,安培力对导体棒所做的功 WA 为多少?
【答案】
(1)导棒向右切割磁感线的过程中,克服安培力做功,将其他形式的能量转化为电能。
故:克服安培力做功等于电能的增加量,即:FA·s = EIt
安培力 FA = BI·(2L)
由于不计导棒电阻,故电动势等于路端电压,即 E = U
导棒在 d、e 之间时,路端电压、电动势不变,切割磁感线的长度为 2L 也不变,导棒应匀速运动,t 内的位移 s = v0t
将 FA = BI·(2L) 和 s = v0t 带入 FA·s = EIt,即可得到 E = 2BLv0
(2)A 先不变后增大
(3)WA = −
【解析】
(1)导棒向右切割磁感线的过程中,克服安培力做功,将其他形式的能量转化为电能。
故:克服安培力做功等于电能的增加量,即:FA·s = EIt
安培力 FA = BI·(2L)
由于不计导棒电阻,故电动势等于路端电压,即 E = U
导棒在 d、e 之间时,路端电压、电动势不变,切割磁感线的长度为 2L 也不变,导棒应匀速运动,t 内的位移 s = v0t
将 FA = BI·(2L) 和 s = v0t 带入 FA·s = EIt,即可得到 E = 2BLv0
(2)当位移 s ≤ L 时,U = 2BLv0,速度 v = v0 =
当位移 L ≤ s ≤ 2L 时,MN 接入电路的有效长度为 (3L − s),
由 U = B(3L − s)v,解出 v =
依据数学原理,A 逐渐增大。故全过程中,A 先不变后增大。
(3)导棒在 d、e 之间运动的过程中,安培力恒定,
WA1 = −BI·(2L)·s1 = − B(
此后的过程中,I =
故安培力的平均值
此阶段,安培力做功WA2 = −
全过程,安培力做功 WA = WA1 + WA2 = −
2006 - 2025,推荐分辨率 1024*768 以上,推荐浏览器 Chrome、Edge 等现代浏览器,截止 2021 年 12 月 5 日的访问次数:1872 万 9823。 站长邮箱
