2.1 体系结构
“A chain is no stronger than its weakest link.”(链子的强度取决于它的最薄弱环节)
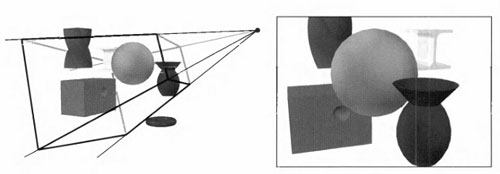
本章的内容是实时绘制的核心,也就是后面将要讲述的绘制管线(或者简称管线)。绘制管线的主要功能就是在给定虚拟相机、三维物体、光源、照明模式,以及纹理等诸多条件下,如何生成或者绘制一幅二维图像。因此,不难看出,对于实时绘制来说,绘制管线是基础。图2.1描述的就是一个使用管线的过程,物体在图像中的位置与形状由它们的几何形状、相机位置以及环境特性等因素决定。而视觉外观则受材料属性、光源、纹理,以及光照模型的影响。
本章将集中讨论和解释绘制管线所包含的几个不同的工作阶段,重点介绍其中的功能而不是如何具体实现这些功能,其目的就是要深入理解图形绘制的具体功能,关于实现手段和方法将会在随后的章节中详细介绍。我们可以用例子来解释这个目的,例如,绘制直线时我们关心的是直线的特性(如顶点数据格式、颜色、模式类型等),它具体是通过Bresenham直线绘制算法还是通过对称双步算法实现的,不是很重要。通常,大部分绘制管线阶段都是通过不可编程的硬件来实现的,要进行优化和性能改善会非常困难。关于基本的绘制和填充算法,在Rogers所编写的书中有详细介绍。对于我们来说,就是决定什么时候,以及如何使用这些给定的方法。
2.1 体系结构
在现实世界中,管线概念的表现方式非常多,如输油管道、工厂的装配线、滑雪缆车等,对于图形绘制来说,也同样采用了管线的概念。
一条管线通常包括多个阶段,无论其中的个别管线速度有多快,管线的整体快慢程度是由管线中最慢的那个阶段决定的。例如,在输油管道中,只有等到石油已经从第1阶段流到第2阶段以后,石油才能从第2阶段流入第3阶段。
理论上,如果要把一个非管线结构分成n个管线阶段,就应该给予一个大小为n的加速因子,例如,当一个滑雪缆车只有一个座位时,效率不会很高,但是如果增加座位,就可以提高效率,在相同的时间内可以把更多的滑雪者运送到山顶上。如果管线各阶段以平行的方式进行工作,那么必须等到其中最慢一个阶段结束工作之后,整个管线阶段才算结束。例如,在汽车装配线上,如果驱动车轮的装配阶段需要3分钟,而其他阶段均需要两分钟,那么制造一辆汽车可以达到的最快速度是3分钟,在装配驱动车轮的过程中,其他阶段必须要闲置1分钟。对于这类特殊的管线,驱动车轮的装配阶段是一个瓶颈,因为它决定整个装配过程的速度。
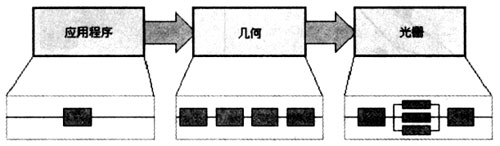
在实时计算机图形学中,也存在这种管线结构(如图2.2所示)。在概念上可以将其粗略分为3个阶段:应用程序、几何以及光栅。这种结构是绘制管线的核心机制,在实时计算机图形学应用中也广为使用,它同时也是随后的章节中讨论的重点。在绘制管线中,每个阶段自身也可能就是一条管线,这就是意味着它可以包含几个子阶段。这里,首先给出概念阶段(应用程序、几何,以及光栅)、功能阶段,以及管线阶段之间的区别。功能阶段规定了这个阶段需要执行的任务,并没有限制该任务在管线中的执行方式。从另一方面来说,一个管线阶段应该与其他管线阶段同时执行,但是为了满足高性能的要求,也可以对它们进行并行化处理。例如,几何阶段可以分成5个功能阶段,但是从图形系统的实现上,却将其划分为一个管线阶段。一个具体的实现方法可能会将两个功能阶段合并为一个管线阶段,同时也可能将另外一个比较耗时的功能阶段分成几个管线阶段,甚至可以让它们互相并行执行。
最慢的管线阶段决定绘制速度,即图像更新速度,这种速度一般用fps来表示,也就是每秒绘制的图像数量,或者用Hz来表示。由于涉及到管线,因此不能将想绘制的所有数据通过整个管线的时间进行简单相加,这就是管线结构的特点,它允许对某些阶段进行并行处理。如果能够确定其中的瓶颈位置,也就是管线中的最慢阶段,同时知道所有数据通过该阶段需要花费的时间,就可以计算出绘制速度。例如,假设瓶颈阶段需要20ms来执行,那么绘制速度是1/0.020=50Hz。但是前提条件是输出设备能够以这种速度不断更新;否则,实际的数据输出速度就会更慢。在其他一些管线应用场合中,绘制速度往往可以用吞吐量这个术语来替代。
示例:绘制速度。假设输出设备的最高更新频率为60Hz,而且找到了绘制管线的瓶颈位置,并且执行该瓶颈阶段需要的时间是62.5ms。这样,绘制速度可以按下列步骤计算。首先,忽略输出设备,则可以提供的最高绘制速度为1/0.0625=16Hz。其次,将这个值调整为输出设备的频率:60Hz意味着绘制速度可以是60Hz、60/2=30Hz、60/3=20Hz、60/4=15Hz、60/5=12Hz等。这就说明期望的绘制速度可以是15Hz,因为这是小于16Hz时输出设备可以达到的最快速度。
如同字面意思所表达的那样,应用程序阶段由应用程序来驱动,因此可以通过软件在通用处理器CPU中实现,这些CPU通常都是多核的,可以并行地处理多个线程,这让CPU可以高效地运行应用程序阶段的大量任务。在CPU上执行的传统任务包括碰撞检测、加速算法、动画,物理模拟等。第二阶段是几何阶段,它处理变换、投影、光照等处理。此阶段主要是计算绘制的内容、如何绘制,以及在什么地方绘制。几何阶段主要是在图形处理单元(GPU)中执行的,GPU包含了很多可编程和固定功能的内核。最后,光栅阶段是利用前面阶段产生的数据进行图像绘制,光栅阶段完全在GPU中进行处理。所有这些阶段和它们内部的管线将在2.2~2.4节中详细讨论,有关GPU处理的细节将在第3章中介绍。
文件下载(已下载 1026 次)发布时间:2012/4/5 9:56:39 阅读次数:6804