实验十一 研究机械能守恒定律
实验器材
朗威DISLab数据采集器、光电门传感器、DISLab机械能守恒实验器、铁架台、计算机。
实验装置
如图11-1。
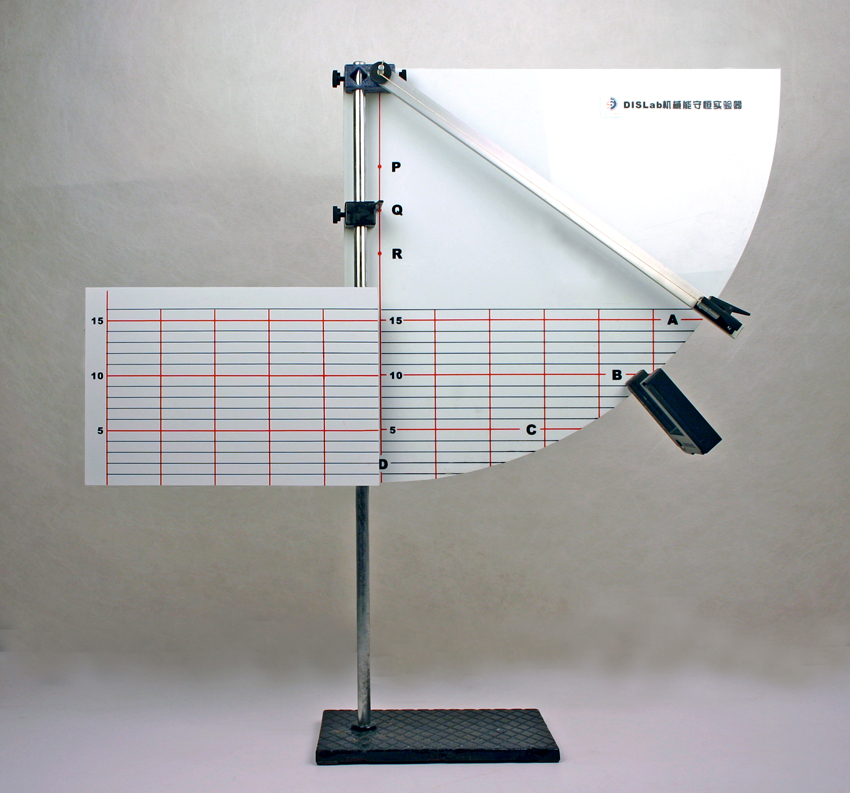
图11-1 验证机械能守恒定律装置图
实验操作
实验(一)
1.架设好DISLab机械能守恒实验器。本实验使用DISLab机械能守恒实验器的主板、副板、定位挡(实验器的安装参见附录。注意:虽然图11-1中光电门传感器已安装,但不在本实验中使用);
2.将定位挡片分别固定在“P、Q、R”三个点,在“A、B、C”三个点释放摆锤,使摆锤线在摆动过程中受到定位挡片的阻挡;
3.观察不同点释放摆锤时摆锤在副板上升的位置,用记号笔标出该位置在副板上的投影点;
4.总结挡片位置、摆锤释放点与摆锤到达点的关系,使学生对论机械能守恒定律有一个定性的了解。
实验(二)
1.架设好DISLab机械能守恒实验器。如图11-1,将光电门传感器接入数据采集器第一通道。
2.点击教材专用软件主界面上的实验条目“动能势能转换”,打开该软件(图11-2)。

图11-2 机械能守恒定律实验界面
3.测量DISLab机械能守恒实验器摆锤的直径Δs及其质量m,将数据输入软件窗口下方的表格。
4.将磁铁夹固定在DISLab机械能守恒实验器的A点,依次将光电门固定在D、C、B点。固定光电门和磁铁夹时为达到精确定位,需使用测平器(测平器的使用方法参见用户手册)。
5.点击“开始记录”。在A点释放实验器的摆锤,摆锤通过光电门传感器的速度就显示在表格中。
6.变更光电门的位置,得出光电门传感器在D、C、B三点时的数据(图11-3)。
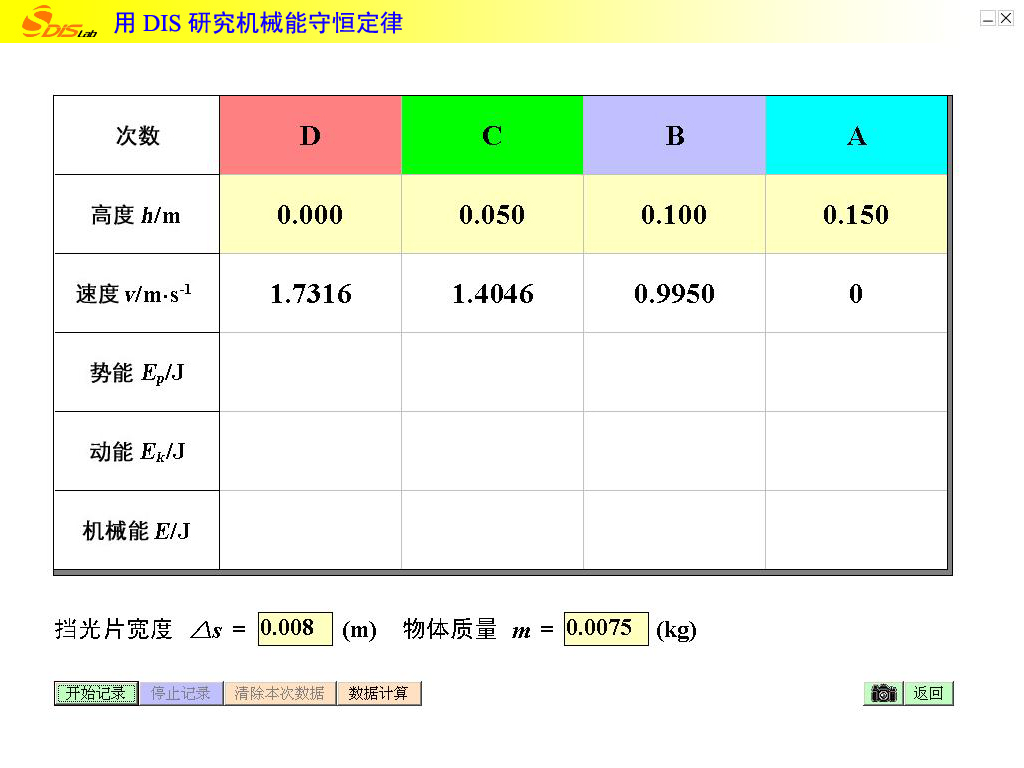
图11-3 记录实验数据
7.点击“数据计算”,得到摆锤通过B、C、D各点时的动能、势能和机械能值(图11-4)。

图11-4 测量并计算得到结果
8.根据实验结果,可见在误差范围内,动能势能转化过程中机械能保持不变。注意每次释放摆锤之前,均需点击“开始记录”。
文件下载(已下载 2357 次)发布时间:2012/3/27 11:30:49 阅读次数:12092