矩阵的基础知识
此篇文章来自于http://www.riemers.net/index.php,原文地址分别是http://www.riemers.net/eng/ExtraReading/matrices_geometrical.php,http://www.riemers.net/eng/ExtraReading/matrices_maths.php,http://www.riemers.net/eng/ExtraReading/homogenous_matrices.php。
矩阵和DirectX
在DirectX 程序中使用的矩阵究竟是什么?也许你已经了解了矩阵的概念,但还想完全控制它们;也许你不关心数学,但想了解矩阵的几何意义,如果属以上两种情况,那么这个教程就是为你准备的。
首先讨论矩阵的几何意义,它可以总结为3个容易理解的特性。第二部分涵盖矩阵使用的数学知识,最后讨论齐次矩阵,它是DirectX实际使用的矩阵。
变换(Transformations)
你应该已经知道变换(transformation),它将任意3D点的坐标变换到另一个3D点的坐标。下图你可以看到3个基本变换的例子:
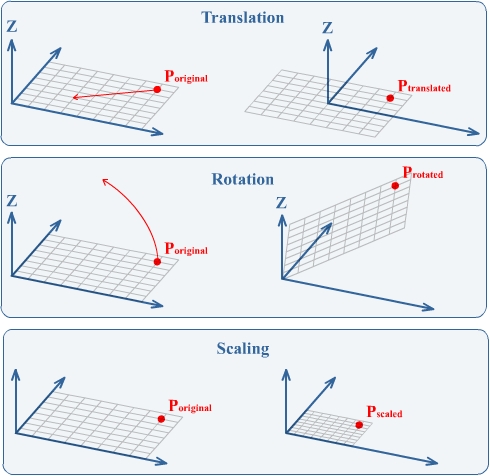
第一个变换只是简单地将3D空间中的所有点移动到左下方,这种变换叫做平移(translation)。第二个变换是旋转(rotation),所有点绕一个指定轴旋转,本例中是绕Z轴旋转。最后一个基本变换是缩放,所有点的坐标乘以一个特定的数值。
我将它们称为基本变换,是因为你能想象的任何变换都可以用这三个基本变换的组合表示。
下图你可以看到平移的结果,然后还要进行旋转:
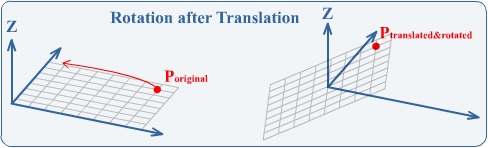
这实际上就是我们在系列1中使用的变换,我们首先将地形中点移动到初始位置,然后当用户按键时旋转它。
3个特性
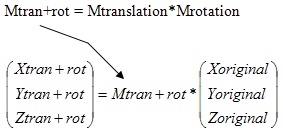
特性1:矩阵可以看做一个特殊(但并不复杂)的元素,可以表示上述变换。所以假如你有3个矩阵:Mtrans, Mrot和Mscal,它们分别对应一种变换。
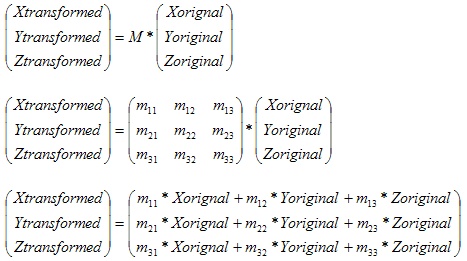
特性2: 如果你将一个矩阵乘以对应的3D点坐标,就可以获取变换后的点坐标,如下图所示:
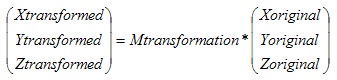
这意味着对任意点,你可以简单地通过将它的坐标乘以一个矩阵获取它的投影、旋转和缩放!
特性3: 如果你将两个矩阵M1和M2相乘,会获得一个新矩阵M3。对应这个新矩阵M3的变换即对应前两个矩阵的变换组合。第三个特性非常有用。例如上面平移后旋转的例子中,计算给定点的位置的一个方法是首先计算经过平移矩阵M1的变换,然后将结果乘以M2计算旋转,这让你必须为每个点计算2次,由下图表示:
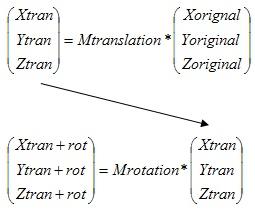
使用第三个特性,你只需简单地先计算M1和M2的乘积获取M3。然后将点乘以矩阵 M3获取点的平移并旋转后的坐标!2个矩阵的乘法很快(64次乘法和48次加法),而变换场景中的所有点要慢得多(每个点16次乘法和12次加法)
矩阵数学
阅读这部分内容时意味着你已经对矩阵有了一个基本的认识,但你还想更深入了解。
所以首先学习一下矩阵看起来象什么。一个矩阵其实就是一个数据表格,就像Excel表格一样,或者也可以看成一个2维浮点数数组。要处理3D坐标,需要使用矩阵的3行和3列,如下图所示:
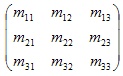
你可以将一个3D点的坐标作为一个矩阵的一列和3行,点和矩阵间的乘法如下定义:
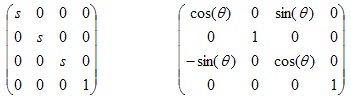
现在你应该知道了所有知识。如你所见,并不是很难。下面举一个例子。设3D空间有一个坐标为(6,18,9.5)的点。先看一个简单的例子:我们想将场景变大为2倍,这意味着我们要缩放2倍,一个简单的缩放矩阵如下所示:

结果是:
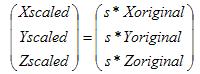
在这个例子中,s = 2,所以点的坐标变为(12, 36, 19)。
下面看一下旋转矩阵,它看起来有点复杂,但记住所有sin和cos实际上就是一个介于-1和+1之间的数值。下面三个矩阵表示绕X,Y和Z轴的旋转,θ为旋转角度:

例如将点(10,5,0)绕Z轴旋转45度,我们的旋转矩阵如下:
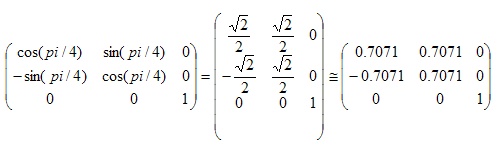
因为pi=3.14对应180度,45度对应pi/4。结果是:

所以当我们将点(10,5,0)旋转45度,结果是点(10.6065, -3.5355, 0)!幸运的是,DirectX可以为你完成这些运算,但现在我们理解了工作原理。
现在还有一个问题,你无法通过乘以一个点的坐标获取点的平移信息。要解决这个问题,DirectX使用了齐次矩阵(homogeneous matrices)。
齐次矩阵
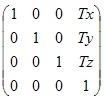
如果你使用DirectX访问一个矩阵,你会看到16个数据项,这意味着4行和4列。选择这种方式是为了让矩阵也可以表示平移。
要平移一个点,我们需要添加一个数字。使用3x3矩阵,我们只能获取初始矩阵的倍数。所以在X,Y和Z边上需要添加一个常数。为了简单起见,设为1。从现在开始,我们使用4个坐标表示一个3D点。例如,位于(10,5,0)的点的坐标为(10,5,0,1)。这些坐标称为点的齐次坐标(homogeneous coordinates)。
缩放和旋转矩阵保持不变,但多了一个额外的行和列其值为0,但m44值为1。下图你可以看到以齐次形式的缩放和Y旋转矩阵:
看起来有点复杂,但现在我们可以定义一个平移矩阵了:
让我们看一个小例子。如果我们想将点(10,5,0)移动(-8,2,4)。可以这样做:
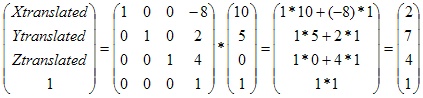
结果是(2,7,4)。但这里我仍想强调3个基本特性:
1) 我们有一个矩阵对应每个基本变换
2) 将点的坐标乘以一个矩阵会获得变换后的坐标
3) 两个矩阵相乘获得一个新矩阵,对应变换的组合
如果你理解以上特性,你会注意到第4个坐标没有几何意义,它只是让我们可以定义一个平移矩阵。
你会注意到有时这个常量不是1。事实上,通用规则是只需简单地将X,Y和 Z 坐标除以第4个坐标,我们将第4个坐标称之为W坐标。
简单地说:(20,10,0,2) = (10,5,0,1),这两个坐标表示的是同一个3D点(10,5,0),所以从4个坐标中获取3D点的简单规则是:
发布时间:2010/5/6 16:26:42 阅读次数:14704