第 8 章 第 1 节 杠杆

第 章 简单机械 功和能
3 000多年前我们的祖先就能使用舂、桔槔等机械劳作。如今,工业机器人的应用提高了生产的精度和效率,人类发明、使用的机械遍布生活各个方面。本章我们将学习简单机械、机械功与机械能的相关知识。
通过本章内容的学习,你将了解杠杆、机械功、机械能和机械效率等基本知识,知道动能和势能的相互转化;经历探究杠杆平衡条件的过程,发展基于数据的分析论证能力;感悟机械的运用对社会生产力发展的重要作用;初步建立能量观念。
第
8
章
·
简
单
机
械
功
和
能
杠 杆
赛龙舟活动(图 8–1–1)是中国端午节的习俗之一,已被列入国家级非物质文化遗产名录,赛龙舟的起源可追溯至战国时期。划龙舟时,人们按锣鼓节拍划桨前进,此时的船桨可以看作一种最简单的机械——杠杆。无论是多么复杂的机械,其实都是由杠杆等各种简单机械组合而成的。杠杆是依据什么原理工作的呢?
什么是杠杆?
硬棒是一种最简单的工具。人们很早以前就已开始使用硬棒舂米、提水,直至今日,我们还常用它来撬动重物。硬棒、切纸刀、开瓶器等工具是我们在生活中经常使用的一类简单机械。
第
1
节
·
杠
杆
如图 8–1–2(a)所示,用硬棒(可选择直尺或铅笔)和橡皮撬动课本,观察撬课本的过程;结合生活中的切纸刀、开瓶器[图 8–1–2(b)(c)]等工具,分析这些工具在使用时有什么共同的特点?
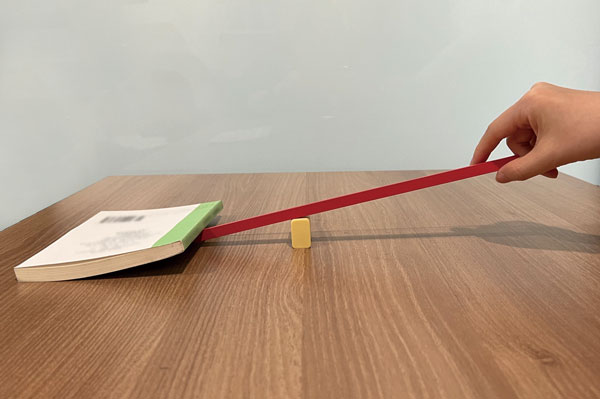


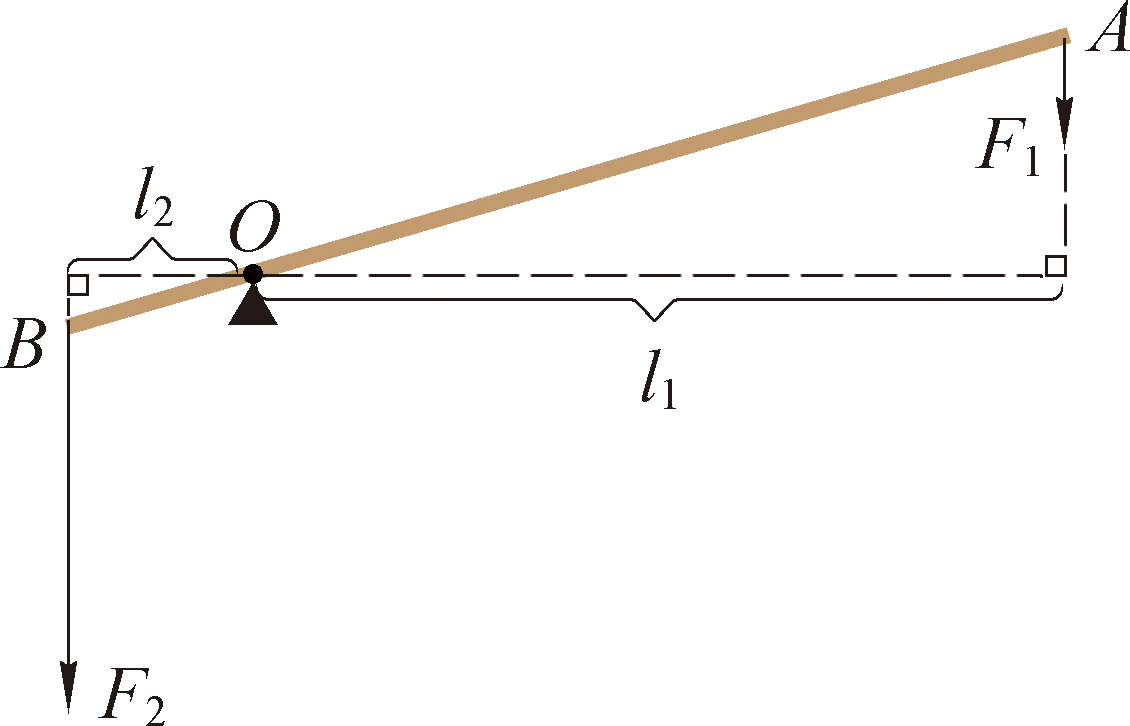

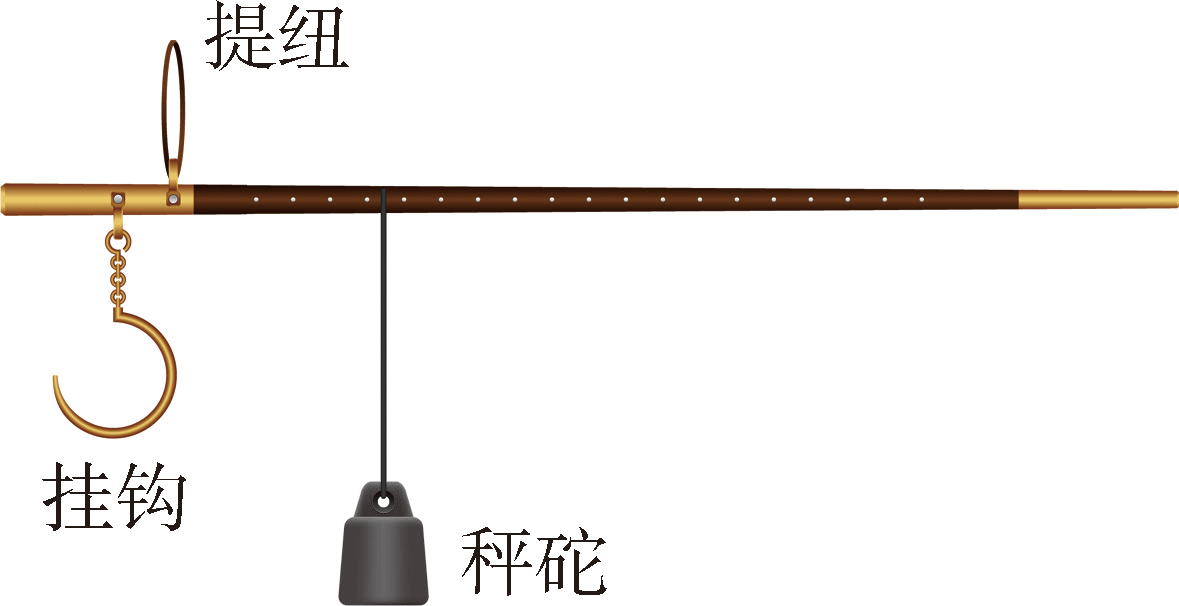
图 8–1–2 中的工具在使用时,可以看作为一根在力的作用下绕固定点转动的硬棒,我们把它叫做杠杆(lever)。
在图 8–1–3 中,硬棒绕着转动的固定点 O 叫做支点,促使杠杆转动的力 F1 叫做动力(通常将人对杠杆的作用力视为动力),阻碍杠杆转动的力 F2 叫做阻力,支点到动力作用线(通过力的作用点沿力的方向所引的直线)的距离 l1 叫做动力臂,支点到阻力作用线的距离 l2 叫做阻力臂。
如果杠杆静止不动或绕支点匀速转动,杠杆就处于平衡状态。
如图 8–1–4 所示的托盘天平、杆秤等工具在使用时也可以看作为杠杆,并且在杠杆处于水平静止的状态下完成物体质量的测量。
第
8
章
·
简
单
机
械
功
和
能
如何使杠杆平衡?
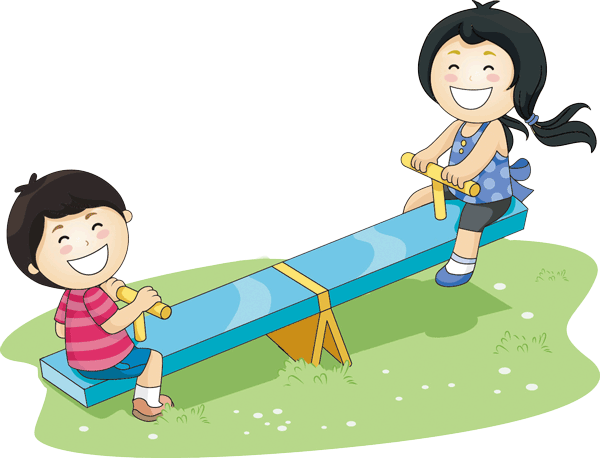
跷跷板(图 8–1–5)也可以看作为杠杆。回顾小时候玩跷跷板的情形,你和小伙伴的质量不同,如何使跷跷板保持水平静止呢?
探究杠杆的平衡条件
提出问题
把两位小朋友对跷跷板的作用力分别看作动力 F1、阻力 F2,相应的动力臂和阻力臂分别为 l1、l2。为了使跷跷板保持水平,质量小的小朋友,通常会坐得离支点更______一些;除了改变坐的位置,还可以通过_______________保持跷跷板水平。
猜想杠杆平衡时,动力、动力臂和阻力、阻力臂之间可能存在什么关系?
搜集证据
器材
现有以下实验器材可供选择:
带有刻度的横杆、铁架台(含支架)、弹簧测力计、天平、钩码、细线(或弹簧夹)。
本实验无需使用的器材是__________________。
方案
① 如图 8–1–6(a)所示,将带刻度的横杆支在铁架台上,做成一杠杆,调节杠杆两端的螺母,使杠杆在水平位置保持平衡。
② 如图 8–1–6(b)所示,将两组钩码分别挂在杠杆的两侧,通过调节钩码的位置,使杠杆在水平位置仍保持平衡。记录动力 F1、动力臂 l1 和阻力 F2、阻力臂 l2。
改变__________________________________________,重复上述操作。
如图 8–1–6(c)所示,将一组钩码挂在杠杆上,在同一侧通过细线用
第
1
节
·
杠
杆
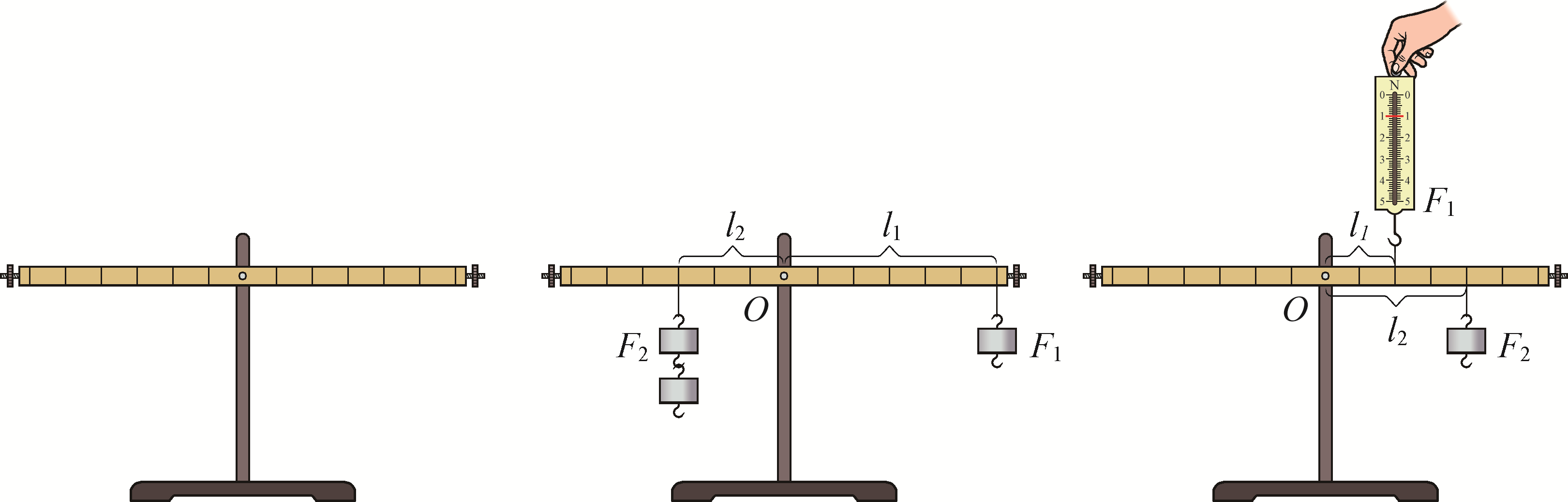
弹簧测力计竖直向上拉杠杆,使杠杆在水平位置仍保持平衡。把弹簧测力计对杠杆的拉力作为动力F1,钩码对杠杆的拉力作为阻力 F2,记录动力 F1、动力臂 l1 和阻力 F2、阻力臂 l2。
改变______________________________________,重复上述操作。
记录
将所有数据记录在表 8–1–1 中。
| 实验序号 | 动力 F1/N | 动力臂 l1/m | 阻力 F2/N | 阻力臂 l2/m |
|---|---|---|---|---|
| 1 | ||||
| 2 | ||||
| 3 |
作出解释
分析
比较上表中各组数据,分析动力 F1、动力臂 l1 和阻力 F2、阻力臂 l2 之间的定量关系。
结论
由上述实验可得,_______________________________________。
交流反思
如果杠杆静止时不水平,实验结论是否成立?简述理由。
第
8
章
·
简
单
机
械
功
和
能
大量实验表明,杠杆的平衡条件为
动力 × 动力臂 = 阻力 × 阻力臂
即
\[{F_1}{l_1} = {F_2}{l_2}\]
杠杆在生活中有哪些应用?
杠杆在生活中有很多应用,我们身边有很多工具可以看作为杠杆。撬棒、切纸刀、开瓶器等工具可以看作为杠杆,钢丝钳、核桃夹、食品钳、镊子、剪刀和筷子等工具,可看作为两个对称杠杆的组合。
使用图 8–1–7 中的各种工具时,均由使用者提供动力。通过观察,比较这些工具使用时动力臂和阻力臂的大小关系,利用杠杆的平衡条件,分析动力与阻力的大小关系。




根据杠杆的平衡条件,使用切纸刀、核桃夹和钢丝钳等工具时,动力臂大于阻力臂,动
第
1
节
·
杠
杆
力小于阻力,这类杠杆叫做省力杠杆;而使用食品钳、镊子、筷子和赛艇的船桨时,动力臂小于阻力臂,动力大于阻力,这类杠杆叫做费力杠杆。
除以上两类杠杆外,还有一类动力臂和阻力臂相等的杠杆,叫做等臂杠杆,使用这类杠杆时,既不省力也不费力。托盘天平就是一种典型的等臂杠杆。
示例 · 如图 8–1–8 所示,体重约 600 N 的同学在水平地面上做俯卧撑,A 点为其重心。试计算该同学处于图示静止状态时,地面对他双手作用力的大小。


解:根据题意,可将该同学看作为一个绕脚与地面接触点转动的平衡杠杆,如图 8–1–9 所示。将人受到的重力看作阻力 F2 = G = 600 N,阻力臂 l 2 = 1.2 m;地面对手的作用力可看作动力 F1,动力臂 l1 = 0.3 m + 1.2 m = 1.5 m。
由杠杆的平衡条件可知:F1l1 = F2l2。
则地面对手的作用力
F1 = \(\dfrac{{{F_2}{l_2}}}{{{l_1}}}\) = \(\dfrac{{600\;{\rm{N}} \times 1.2\;{\rm{m}}}}{{1.5\;{\rm{m}}}}\) = 480 N
第
8
章
·
简
单
机
械
功
和
能
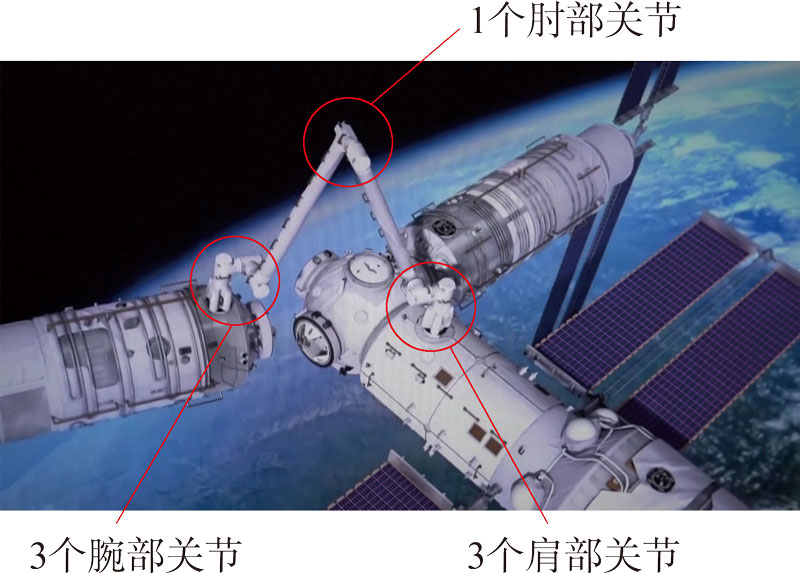
2022 年 1 月,我国首次利用空间站机械臂,操作大型在轨飞行器进行转位试验,取得圆满成功。
机械臂在空间站的组装和建造、辅助航天员维护和维修等工作中起着重要的作用。图 8–1–10 是中国首款具有7个关节的机械臂,它在进行某些工作时,可看作是绕相应关节转动的杠杆。
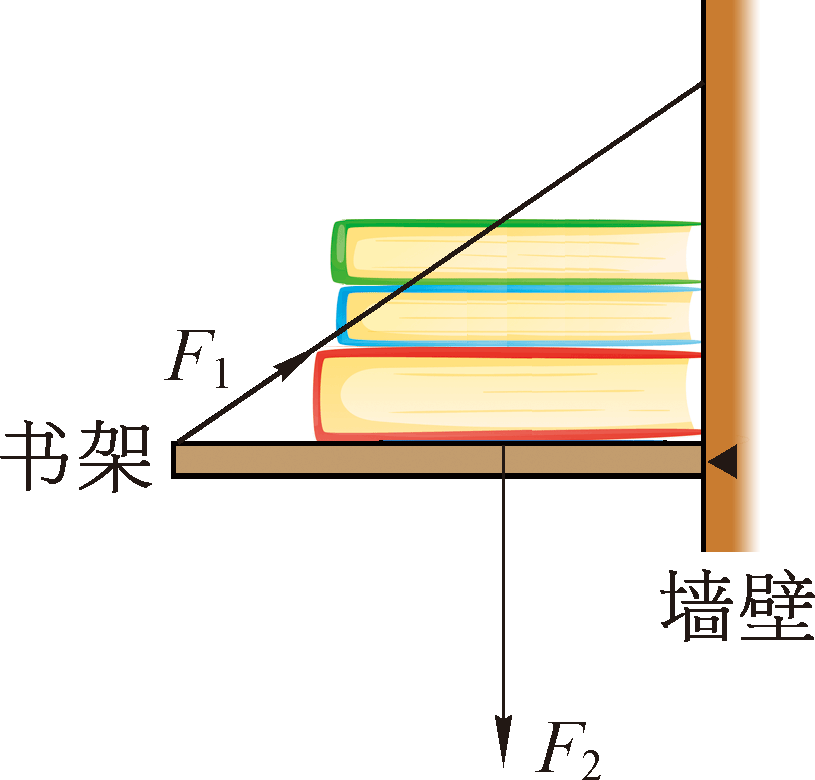
1.如图 8–1–11 所示,悬挂在墙壁上的书架可以看作杠杆。试在图中标出支点 O,并画出动力臂 l1 和阻力臂 l2。
2.杠杆平衡时,动力 F1 的大小为 20 N,动力臂 l1 为 0.8 m,阻力臂 l2 为 0.4 m,求阻力 F2 的大小。
3.赛艇的船桨是费力杠杆,我们为什么要使用费力杠杆呢?
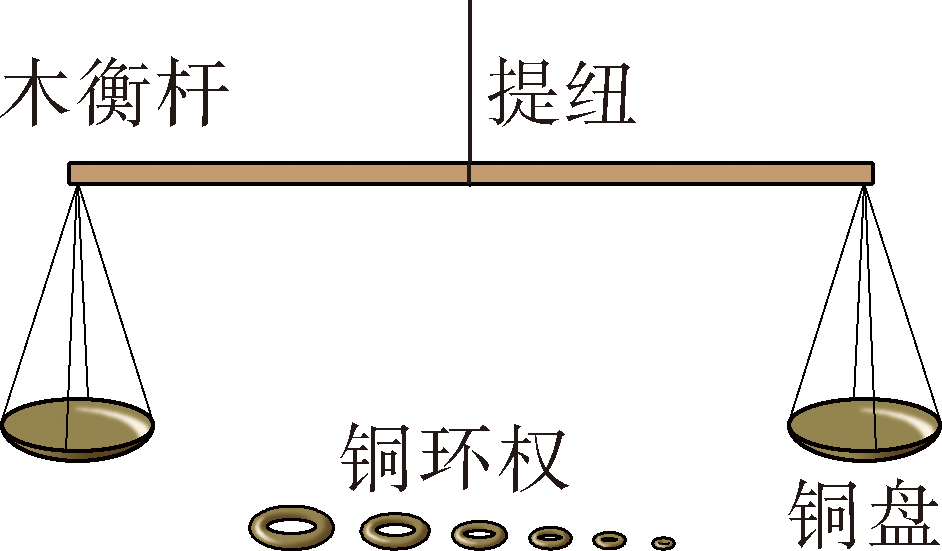
4.利用杠杆原理所制作的各种衡器是中国古代人民智慧的结晶,如在长沙附近左家公山楚墓中发现的衡器包括木衡杆、青铜盘和青铜环权。木衡杆中间以提纽作为支点,两端各以四根细丝线悬吊铜盘(图 8–1–12),
第
1
节
·
杠
杆
将被测物和铜环权分别置于木衡杆两端的铜盘中,就可以称量物体的质量。
(1)木衡杆和铜盘相当于我们实验时使用的________________,而铜环权则相当于________________。
(2)杆秤是中国人民在衡器技术上的重大发明之一。图 8–1–12 所示衡器是通过________________的质量来反映被称量物体的质量,杆秤是通过杆上的刻度线所标数值来反映被称量物体的质量。试简述杆秤有哪些优点。
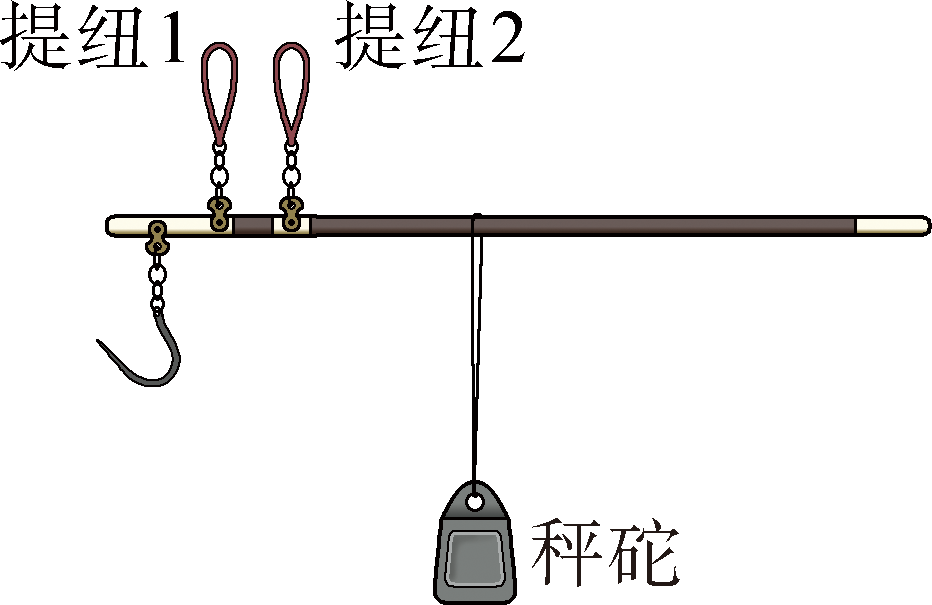
(3)图 8–1–13 所示是有两个提纽的杆秤,根据杠杆的平衡条件,若要测量质量较大的物体,应该选用提纽________,试简述理由。
主题学习:人体与机械 1
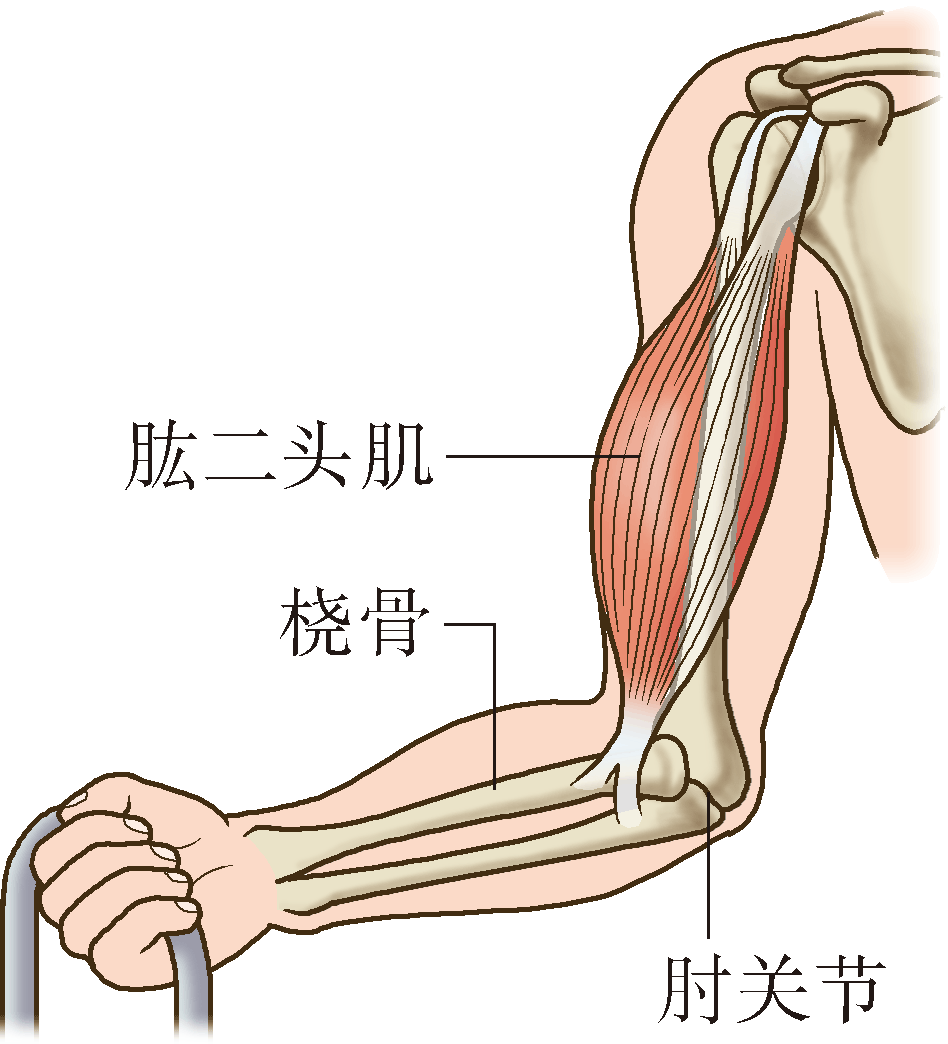
人体中有许多结构类似杠杆。如图 8–1–14 所示,用手提起重物的过程中,桡骨在肱二头肌的牵引下绕着肘关节转动。从物理学视角来看,这一过程中桡骨可以看作为杠杆。
(1)将肱二头肌对桡骨的牵引力作为动力,重物对手的作用力作为阻力,在图 8–1–14 中标出支点 O,并画出动力 F1 和阻力 F2 的示意图。
(2)此时桡骨属于省力杠杆还是费力杠杆?简述理由,并分析这种杠杆的优势。
(3)找一找,常见运动中有哪些人体结构可以看作为杠杆模型?
发布时间:2026/4/10 21:50:48 阅读次数:415