实验三十六 向心力研究
实验器材
朗威光电门传感器(LW-F851)、力传感器(LW-F801)、向心力实验器(LW-Q859)、计算机。
实验装置
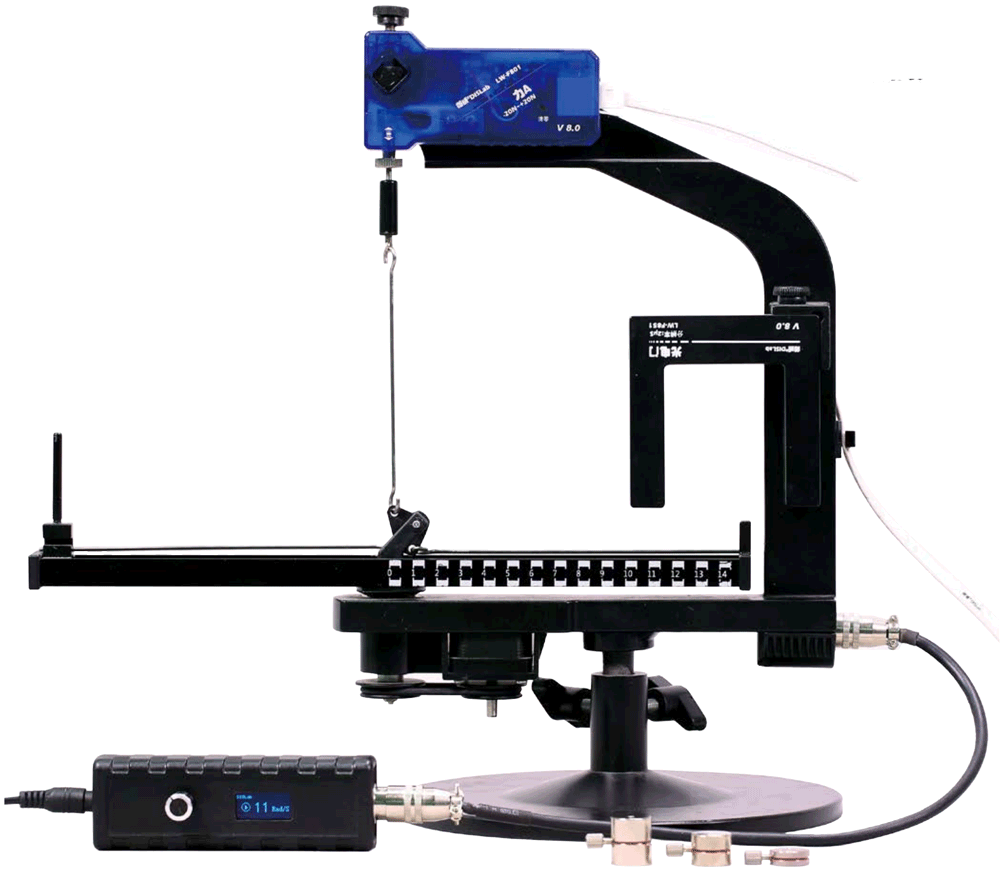
如图 36 – 1。
实验操作(专用软件)
1 进入专用软件“向心力研究 II”实验;
2 单击进入“研究向心力与角速度的关系”实验,输入砝码质量及运动半径,单击“开始记录”,单击“传感器调零”;
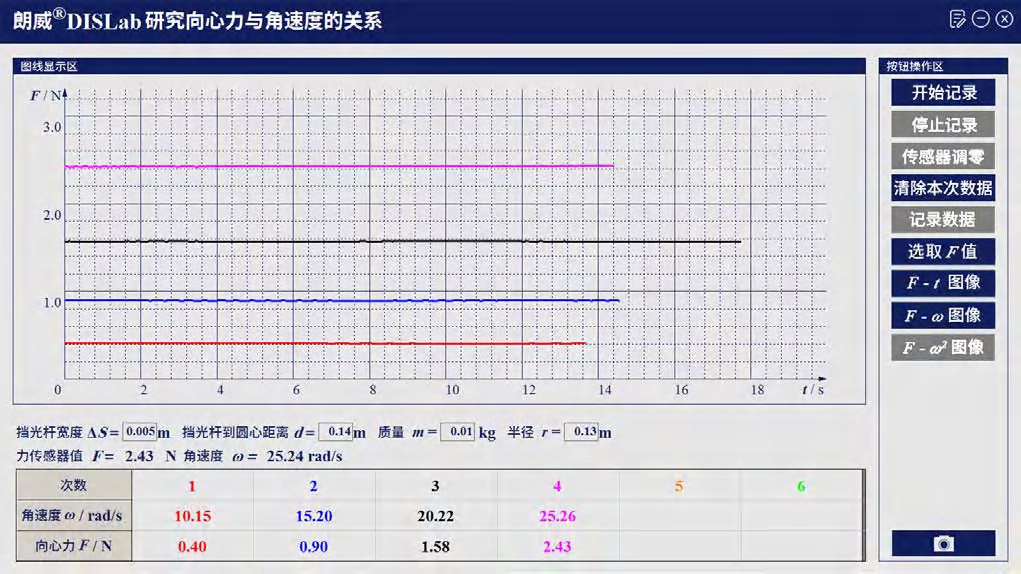
3 启动电机,使旋臂转动,待力传感器测得示数稳定之后,单击“记录数据”,多次调节角速度,多次实验;单击“选取 F 值”,在图线区选择部分曲线,得到砝码质量及运动半径相同时的角速度的值及相应的向心力的值如图 36 – 2,对表格中数据进行绘图;
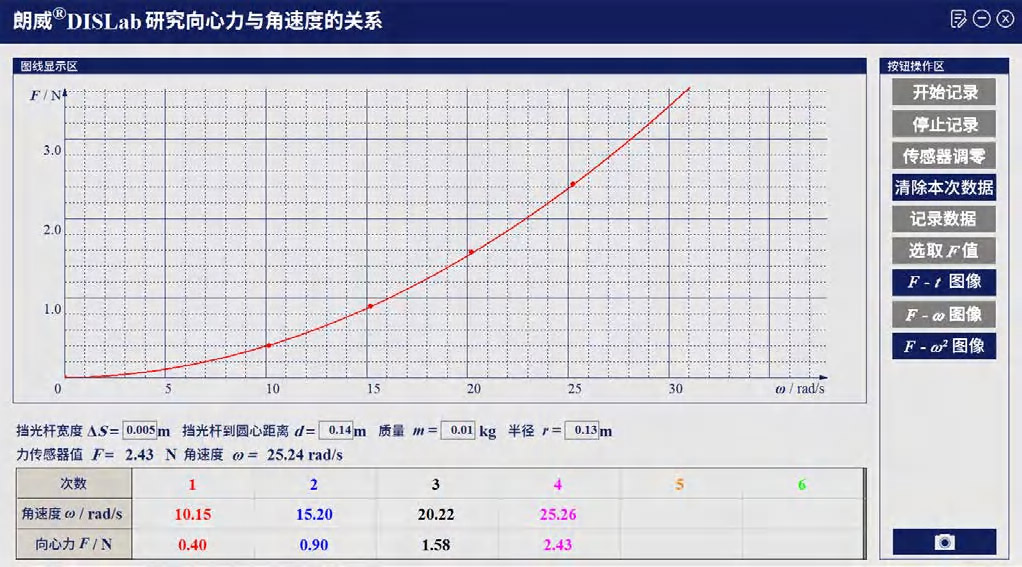
4 依次单击“F – ω 图像”,观察图像数据点基本分布在二次函数图线上,推断 F – ω 呈二次方关系,如图 36 – 3;
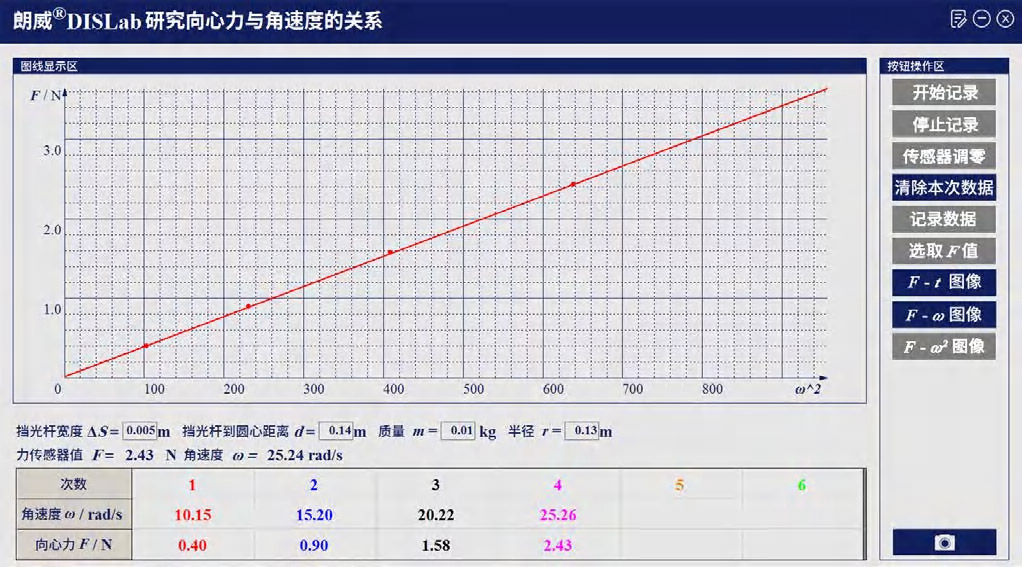
5 单击“F – ω2 图像”,观察图像,数据点分布在过原点的直线上,推断 F – ω2 是一次方关系,如图 36 – 4;
6 单击进入“研究向心力与质量的关系”实验,保证砝码运动的半径及电机控制角速度相同;

7 单击“开始记录”,单击“传感器调零”;改变砝码质量,进行多次实验,记录多组数据,单击“选取 F 值”,得到相同角速度时,不同质量对应的向心力的值并记录到表格中如图 36 – 5;
8 单击“F – m 图像”得到拟合图像,接近于正比例函数曲线如图 36 – 6;

9 单击进入“研究向心力与运动半径的关系”实验,保证砝码质量及电机控制角速度相同;
10 单击“开始记录”,单击“传感器调零”;改变运动半径,进行多组实验,记录多组数据,单击“选取 F 值”,得到相同角速度时,不同运动半径对应的向心力的值并记录到表格中,如图 36 – 7;
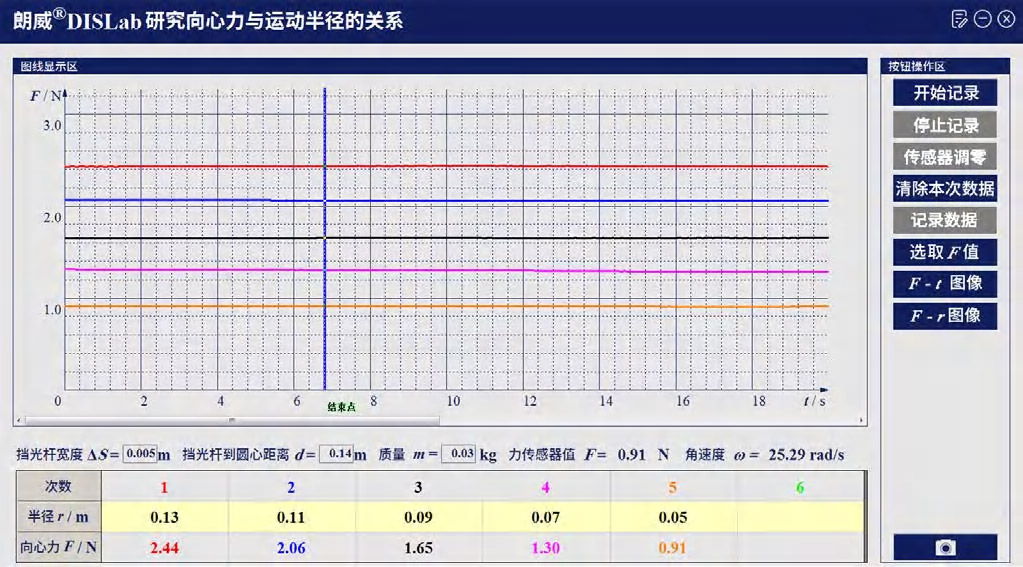
11 单击“F – r 图像”,得到拟合曲线接近于正比例函数曲线,如图 36 – 8。

实验操作(通用软件)
1 可以将电机去除,用手拨动旋臂完成实验;
2 力传感器调零,把砝码固定在离轴心 0.12 m 处;(本次实验 m = 0.022 kg,r = 0.12 m);
3 单击“计算表格”单击“开始”,拨动悬臂,记录 F、t 数据;
4 单击“公式”,设置计算线速度和角速度的公式:v = 0.005 / t,ω = v / 0.14,得到计算结果(图 36 – 9);
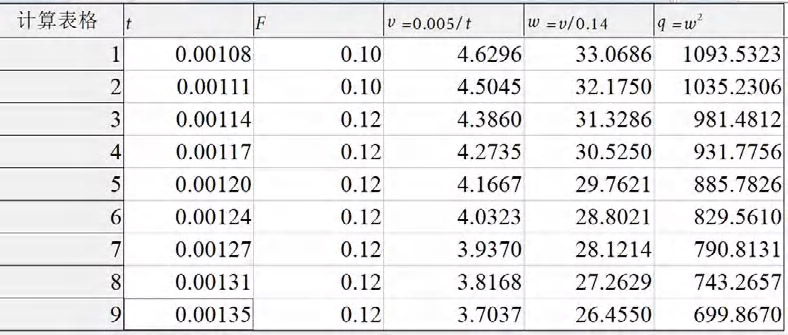
注意
0.005 m 为挡光杆宽度。
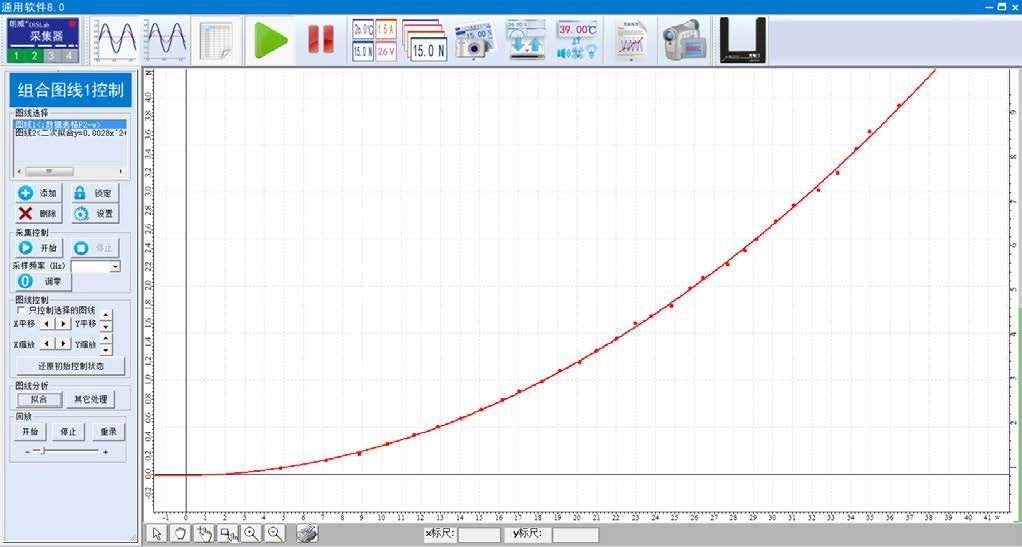
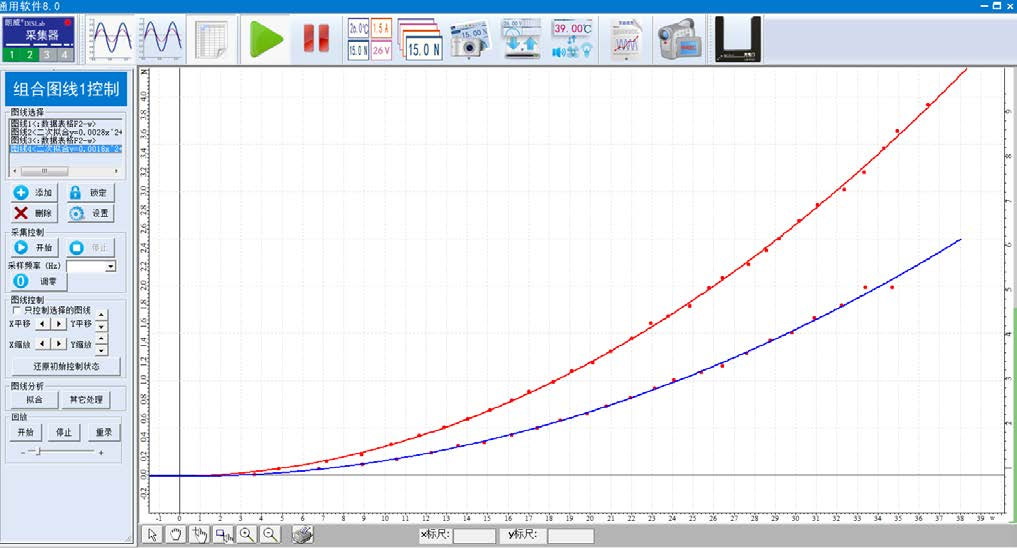
5 单击“绘图”,选取 x 轴为“ω”,y 轴为“F”,得到坐标系内的数据点,对数据点进行二次拟合,如图 36 – 10;
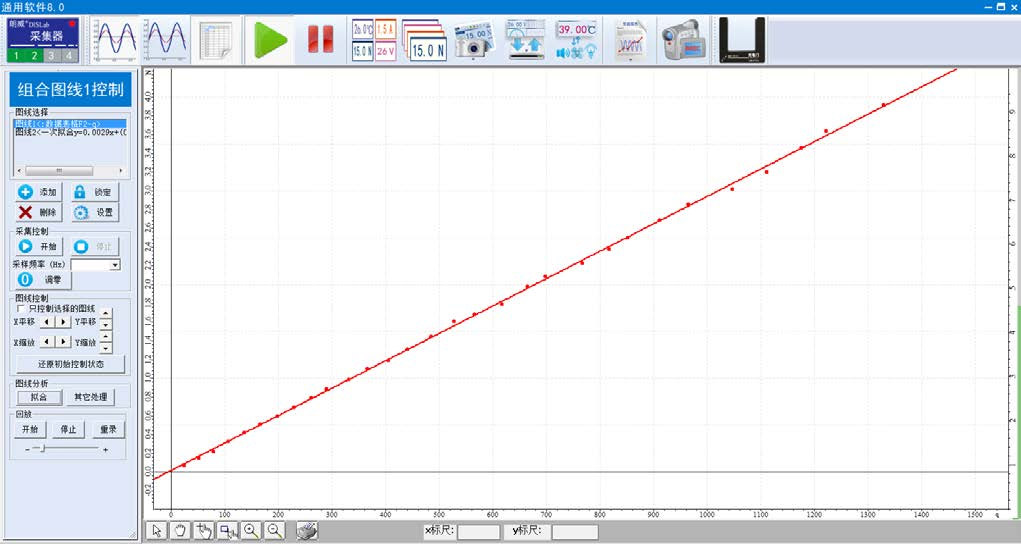
6 表格中,设置计算角速度平方的公式 q = ω2,单击“绘图”,选取 x 轴为“q”,y 轴为“F”,得到数据点分布图,单击“线性拟合”,拟合图线为过原点的直线(图 36 – 11),说明向心力与角速度之间是二次方关系。保存上述实验数据;
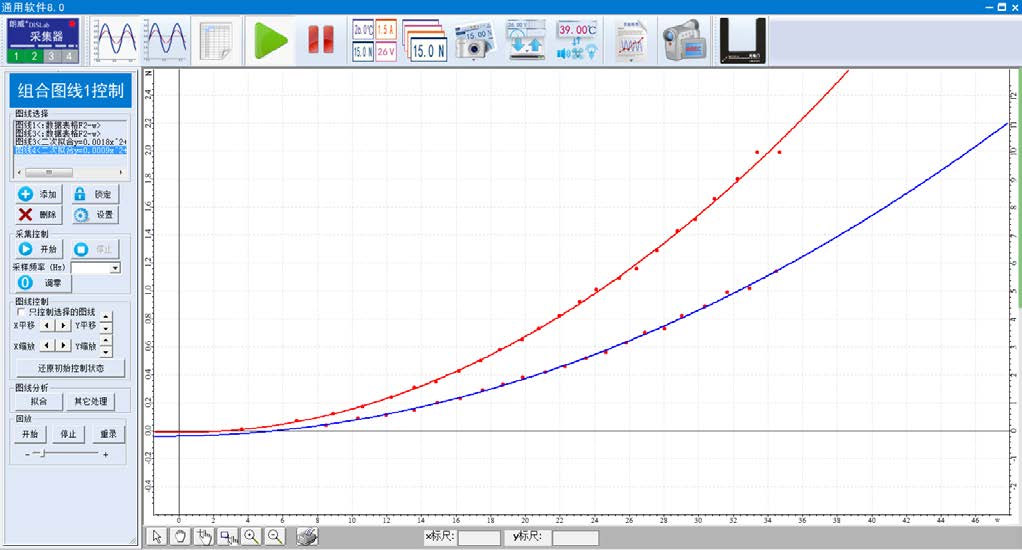
7 将砝码的转动半径改为 0.06 m,重复上述步骤,得到另一条实验图线;用软件“显示坐标”功能,比较 ω 相同时,两条图线 F 的大小(图 36 – 12);
8 设置砝码的转动半径为 0.10 m,再次实验,更换砝码的质量,获得两条实验图线;软件“显示坐标”功能,比较 ω 相同时,两条图线 F 的大小(图 36 – 13);根据上述结果,总结 F 与 ω、m 之间的关系。
视频地址:http://llongwill.qybee.com/lecture/13967。
文件下载(已下载 70 次)发布时间:2023/4/2 19:39:51 阅读次数:4598