实验三十二 研究力的相互作用
实验器材
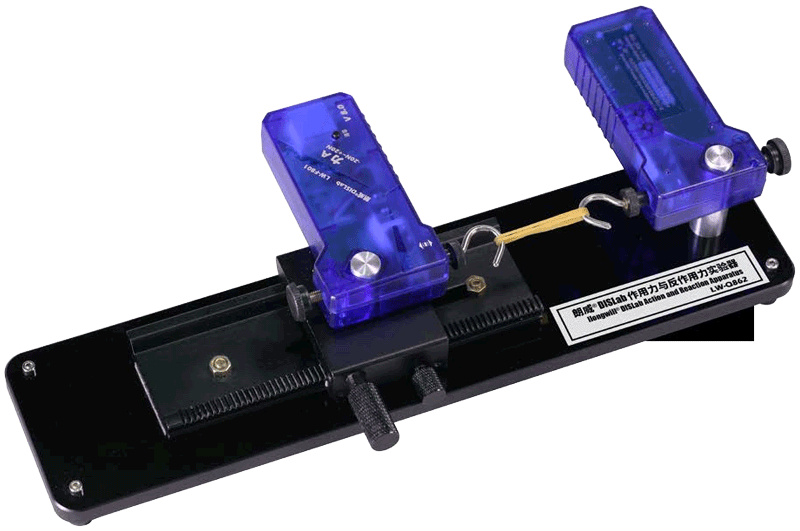
朗威作用力与反作用力实验器(LW-Q862)、力传感器 ×2(LW-F801)、计算机。
实验装置
如图 32 – 1。
实验操作(专用软件)
1 进入专用软件“力的相互作用”实验;
2 将两只力传感器测钩相对,固定在实验器上,在两只力传感器不受橡皮筋拉力的情况下单击“传感器调零”;
3 单击“开始实验”,旋转调距旋钮,得出实验“F – t” 曲线,实验结束后,单击“停止实验”;
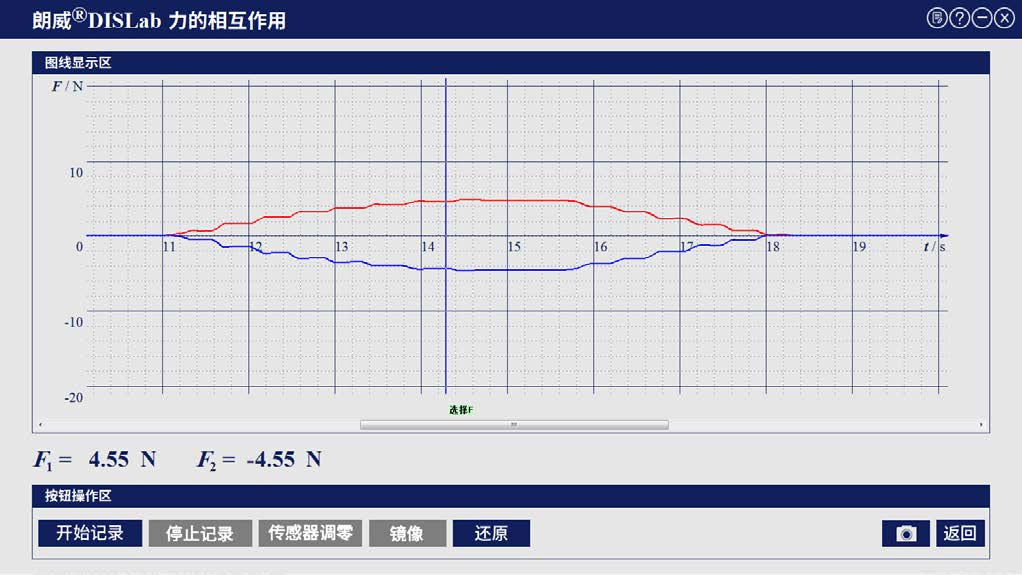
4 在“F – t”曲线任意选择一点,获取该时刻两只力传感器的测量值,可得测量值基本相同(如图 32 – 2);
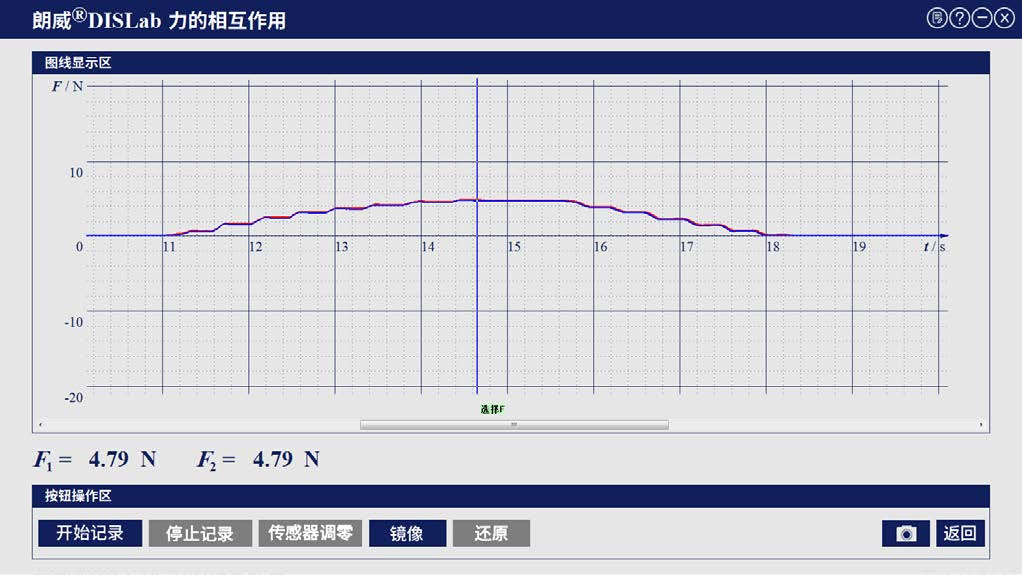
5 单击“还原”图线(如图 32 – 3),将其中力 – 时间曲线以 x 轴对称,可观察到两条“F – t”图线的重合程度(如图 32 – 3)
实验操作(通用软件)
1 进入通用实验界面;
2 将两只力传感器测钩相对,固定在实验器上,在两只力传感器不受橡皮筋拉力的情况下单击“传感器调零”;
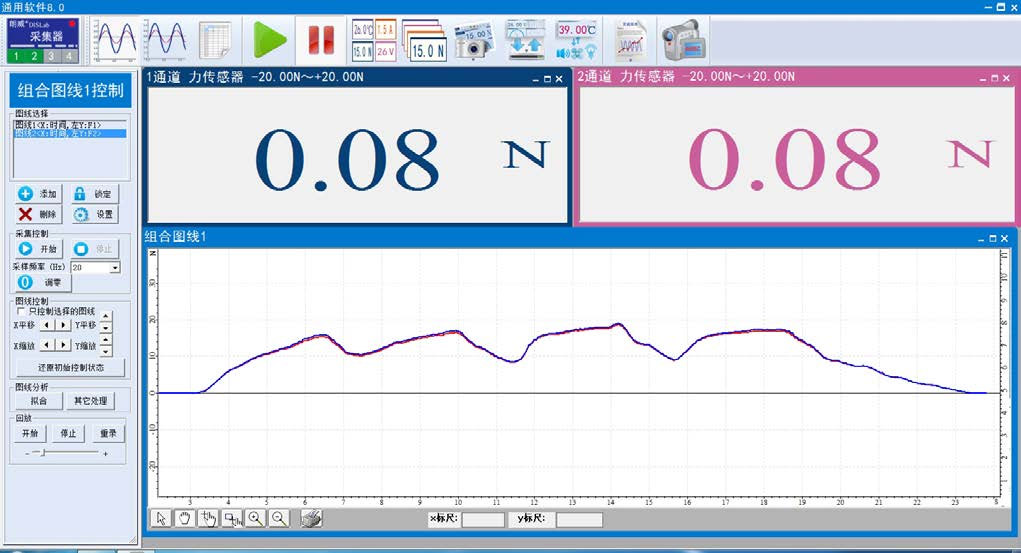
3 单击“组合图线”,添加两条“F – t”实验图线,单击“开始记录”,旋转调距旋钮,得到实验图像;
4 发现两条“F – t”实验图线基本重合,说明两力大小相等(如图 32 – 4);
5 使用 “设置”,以 x 轴为镜像,将其中一条“F – t”图像以 x 轴对称显示,即镜像图(如图 32 – 5);

6 取下两力传感器测钩,加上强力磁铁,进入通用软件,将两传感器调零,建立两条“力 – 时间”曲线,调节调距旋钮,获得两条以 x 轴呈上下对称的图线(如图 32 – 6);

7 结合实验结果,总结牛顿第三定律在实验中的体现。
注意
1、实验两力传感器的测钩相对,分别固定在实验器的两个固定柱上,注意测钩角度;
2、实验过程中须保证两只力传感器测钩轴心及橡皮筋位于同一直线上,不要产生扭力;应尽量缓慢地旋转调距旋钮,并适时锁紧或解锁锁紧螺栓;
3、改变实验次序,尝试另外一种教学思路:先观察镜像图像,得出两力方向相反;再取消镜像模式,借助两图线的重合现象,验证两力大小相同;
4、尝试引导学生画出上下不对称的图线,对应此时的操作手法分析图线不对称的原因,加深对正确操作方法的理解和认识。
视频地址:http://llongwill.qybee.com/lecture/14592。
文件下载(已下载 37 次)发布时间:2023/3/29 7:41:55 阅读次数:3725