第一章 动量
1 自主活动 验证动量定理
活动指导
活动目的:
(1)用光电门传感器测量瞬时速度大小,获得物体动量的大小。
(2)用力传感器获得 F – t 图像,理解 F – t 图像与时间轴所围的面积表示作用力 F 的冲量。
(3)比较动量的变化与作用力 F 的冲量的关系以验证动量定理。
在实验前应先阅读选择性必修第一册教材第 6 页的正文和第 7 页“大家谈”,了解如何通过 F – t 图像所围的面积得到作用力 F 的冲量。
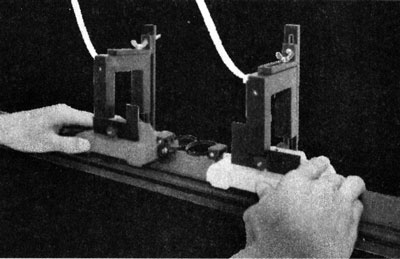
实验装置如图 1 – 1 所示,实验时的具体操作如下:

(1)调节装在小车上的弹性圈,使圈面水平。调节力传感器,使挂钩轴线与弹性圈直径在同一直线上,且与导轨方向平行。
(2)调节光电门传感器的高度,使带有挡光片的小车能顺利通过。调节光电门传感器的安装位置,使挡光片通过光电门时小车前端的弹性圈恰好与挂钩接触。
(3)正确连接传感器、数据采集器和计算机,运行软件,在界面相应位置录入小车的质量和挡光片的宽度。
(4)将小车置于光电门传感器的左侧,推动小车使其以一定的速度通过光电门传感器,弹性圈撞击力传感器上的挂钩,撞击后小车反弹再次通过光电门传感器。分别记录碰撞前、后小车的瞬时速度,计算小车动量变化量的大小 Δp。
(5)记录弹性圈撞击力传感器挂钩过程中挂钩受力 F 随时间 t 变化的图像,并在 F – t 图像上选择合适的区域,得到相应的面积大小即力 F 的冲量 I 的大小。比较 Δp 与 I 的大小。
(6)通过增减配重片数量改变小车质量;用不同大小的力推小车使其获得不同的速度。多次实验,比较各次实验中 Δp 与 I 的大小,验证动量定理。
思考
设计一个实验方案,验证在恒力作用下小车的运动满足动量定理。
2 自主活动 夹子与笔的分离
活动指导
活动目的:
用身边的物品,实现一个反冲现象。
实验装置示意图如图 1 – 2 所示。实验时的具体操作如下:

(1)用夹子夹住一支笔的尾部后置于水平桌面上。要求既能使夹子夹住笔,又能使两者比较容易分离。
(2)用手指轻轻敲击夹子的夹口处,使两者分离。
(3)观察笔和夹子的运动情况。
该实验不易一次成功,可多次尝试。
思考
为什么夹子与笔的运动方向相反?
3 学生实验 验证动量守恒定律
实验指导
1.实验说明
在本实验中,小车一端安装弹性圈,另一端装有尼龙搭扣。用光电门传感器与挡光片测量碰撞前、后小车的速度,计算小车的动量。
调整光电门传感器的位置,使相互作用前、后小车上的挡光片尽可能靠近光电门传感器,以减小实验误差。
2.实验操作
将两个光电门传感器安装在水平导轨上,数据采集器与计算机连接。
第一次实验:两小车在内力作用下,由静止向相反方向运动
如图 1 – 3 所示,在两小车上固定挡光片和弹性圈,使两小车上的弹性圈处于同一高度。首先,调整光电门传感器的高低,使装有挡光片的小车能顺利通过并挡光;然后使小车处于弹性圈相互接触的状态,调整光电门传感器在导轨上的位置,使挡光片恰好处于将要挡光的位置。推动小车使弹性圈互相挤压。
释放小车,获得小车的速度大小,经过计算可得释放前、后小车的动量大小。改变小车的质量或弹性圈的挤压程度,多次实验。将所得的实验数据记录在数据记录表中。
第二次实验:小车 B 碰撞静止的小车 A 后,两小车一起运动
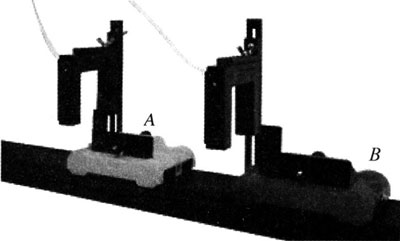
如图 1 – 4 所示,将两小车上装有尼龙搭扣的一端相对,并使尼龙搭扣处于同一高度。调整光电门传感器在导轨上的位置,使小车 B 上的挡光片在右侧光电门传感器刚结束挡光就能立即与静止的小车 A 相撞。小车A静止于两个光电门传感器之间,当其被撞击后,挡光片能立即开始挡光。
推动小车 B,使其以一定的速度通过光电门传感器后与静止的小车 A 碰撞。由于尼龙搭扣的作用,两车一起向左运动。通过光电门传感器获得小车的速度大小,经过计算可得碰撞前、后两小车动量的大小。改变两小车的质量或改变小车 B 的速度,多次实验,将所得的实验数据记录在数据记录表中。
实验报告
实验名称
验证动量守恒定律
实验目的
用光电门传感器测量小车的速度大小,验证动量守恒定律。
实验原理
若系统所受外力可忽略,相互作用前、后系统的动量守恒。
实验器材
导轨、光电门传感器(2 个)、小车(2 辆,均配有弹性圈、尼龙搭扣)、配重片、数据采集器、计算机。
实验方法与步骤
用光电门传感器测量相互作用前、后两小车的速度。通过调整光电门传感器与小车的相对位置,减小阻力对小车相互作用前、后速度的影响。
本实验的主要步骤如下:
第一次实验:两小车在内力作用下,由静止向相反的方向运动
(1)组装图 1 – 3 所示的实验装置,调节光电门传感器的高度,使装有挡光片的小车可以顺利通过并挡光。
(2)使两小车的弹性圈相互挤压。同时释放,测量相互作用前、后两小车的速度大小,记录实验数据。
第二次实验:小车 B 碰撞静止的小车 A 后,两小车一起运动
(1)组装图 1 – 4 所示的实验装置,调节光电门传感器的高度,使装有挡光片的小车可以顺利通过并挡光。
(2)调整小车的位置,将两小车装有尼龙搭扣的一端相对,推动小车 B,使其以一定的速度与静止的小车 A 碰撞后一起运动。测量相互作用前、后两小车的速度大小,记录实验数据。
(3)整理器材。
实验数据记录
第一次实验:
表 1 – 1
|
实验序号 |
相互作用前两小车的速度 |
相互作用后两小车的速度 |
小车A的质量 |
小车B的质量 |
||
|
vA0/(m·s−1) |
vB0/(m·s−1) |
vA/(m·s−1) |
vB/(m·s−1) |
mA/kg |
mB/kg |
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
第二次实验:
表 1 – 2
|
实验序号 |
相互作用前两小车的速度 |
相互作用后两小车的速度 |
小车A的质量 |
小车B的质量 |
||
|
vA0/(m·s−1) |
vB0/(m·s−1) |
vA/(m·s−1) |
vB/(m·s−1) |
mA/kg |
mB/kg |
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
实验数据处理
根据表 1 – 1 中记录的数据,计算系统相互作用前、后的动量,填入表 1 – 3 中。
表 1 – 3
|
实验序号 |
相互作用前系统的动量 |
相互作用后系统的动量 |
|
(mAvA0 + mBvB0)/ (kg·m·s−1) |
(mAvA + mBvB)/ (kg·m·s−1) |
|
|
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
4 |
|
|
|
5 |
|
|
根据表 1 – 2 中记录的数据,计算系统相互作用前、后的动量,填入表 1 – 4 中。
表 1 – 4
|
实验序号 |
相互作用前系统的动量 |
相互作用后系统的动量 |
|
(mAvA0 + mBvB0)/ (kg·m·s−1) |
(mAvA + mBvB)/ (kg·m·s−1) |
|
|
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
4 |
|
|
|
5 |
|
|
结果分析与实验结论
两小车在____________________条件下,____________________基本相同。
讨论与思考
(1)在实验开始前为何要调节光电门传感器与挡光片的相对位置?
(2)用第二次实验的装置,要使小车 B 碰撞后静止,小车 A 以小车 B 碰撞前的速度大小反向弹出,写出实验操作的步骤。
学期活动 设计并完成一个测量反冲物体所受冲力的实验
活动内容与要求
这是一个测量类的活动,根据动量定理设计一个测量反冲物体所受冲力随时间变化的方案,并进行实验。
本实验要求理解动量定理,了解推力与喷出物质的质量、速度的关系。设计一个测量反冲物体所受冲力的方案,并按照方案开展实验。在设计、改进、交流的过程中,相互借鉴,逐步完善。
测量的具体要求见选择性必修第一册教材第 18 页。
活动指导
本活动要求从“阅读材料”中获得有用信息,设计方案,实施测量,分析结果。
参考资料
(1)选择性必修第一册教材第 18 页提供了“阅读材料”,可以作为测量方案设计的参考。
(2)选择性必修第一册教材第 14 页关于反冲现象的介绍是本活动的学习基础。
评价量表
表 1 – 5
|
评价指标 |
表现标准 |
表现水平(参阅操作说明) |
|
|
自评 |
他评 |
||
|
物理观念 |
理解动量定理 |
|
|
|
知道火箭发射利用了反冲现象 |
|
|
|
|
科学思维 |
能根据动量定理,分析推理反冲物体所受冲力与哪些因素有关 |
|
|
|
能将研究对象和过程转化为物理模型 |
|
|
|
|
科学思维 |
能基于恰当的证据表达自己的观点 |
|
|
|
能对他人的设计提出质疑和改进意见 |
|
|
|
|
科学探究 |
能提出科学的测量方案,能表述所测物理量间的关系 |
|
|
|
能选用适合的器材,规范操作,获得数据 |
|
|
|
|
能撰写完整的实验报告 |
|
|
|
|
能用规范的语言对实验过程和结果进行交流和反思 |
|
|
|
|
科学态度与责任 |
合作过程分工合理,职责明确 |
|
|
|
合作中尊重他人,实事求是 |
|
|
|
|
有保护环境,节约资源的意识 |
|
|
|
|
操作说明 |
对照表现标准,根据符合程度进行表现水平评价,“5”表示完全符合,“4”表示大部分符合,“3”表示基本符合,“2”表示少量符合,“1”表示基本不符合 |
||
第四部分 本章实验与活动部分解读
1 自主活动 验证动量定理
参考解答:利用牛顿第二定律的实验装置,细绳一端连接小车,另一端跨过滑轮连接钩码。释放小车,小车和钩码所受阻力不计或保持不变,小车将在大小和方向都不变的拉力 F 作用下做匀加速直线运动。运动中通过两个光电门传感器,测量挡光片通过两光电门时的速度 v1、v2,同时记录小车从第一个光电门传感器运动到第二个光电门传感器的时间 Δt。恒定拉力 F 可通过小车上的力传感器获得。因为小车做加速运动,拉力 F 与钩码重力的大小并不相等。从而验证 F Δt = m(v2 – v1)
命题意图:经历方案设计的过程,深化对动量定理的理解。
2 自主活动 夹子与笔的分离
参考解答:将笔和夹子视为系统,忽略系统所受的外力,笔和夹子的总动量为零,笔和夹子分离时水平方向的动量大小是相等的,方向相反,所以它们向相反的方向运动
命题意图:观察现象,对现象做简单的分析和解释。
3 学生实验 验证动量守恒定律
(1)参考解答:减小相互作用过程中阻力的冲量,满足动量守恒的条件
命题意图:理解实验方案中的操作,加深对动量守恒条件的认识。
(2)参考解答:①将装有弹簧圈且质量相等的两小车相对放置,如图 5 放置。小车 A静止,小车 B 碰撞静止的小车 A,验证两小车的速度交换。

② 调整光电门传感器的位置,使装有挡光片的小车能顺利通过光电门传感器,进一步调整光电门传感器在导轨上的位置,使小车 A 静止在两光电门传感器之间,其挡光片靠近光电门传感器的接收孔,调整另一光电门传感器在导轨上的位置,使小车 B 挡光结束时,立即与静止的小车 A 相互碰撞。
③ 正确连接传感器、数据采集器和计算机,运行软件,在界面相应位置,录入两小车的质量和挡光片宽度。
④ 推动在光电门传感器之外的小车 B,在其将要到达光电门前放手。小车 B 将与静止在两光电门之间的小车 A 碰撞,由于弹簧圈的作用,原本静止的小车 A 向左运动,原本运动的小车 B 静止。光电门传感器测得的小车 B 碰撞前的速度和小车 A 碰撞后的速度
命题意图:修改原有实验方案,实现新的实验情境。
文件下载(已下载 133 次)发布时间:2023/2/12 21:57:37 阅读次数:3355