舵机应用
舵机是用来控制舵的,比如轮船的方向舵,飞机的方向舵、升降舵等,这些都需要控制一定的角度,但并非需要连续旋转。所以一般舵机都是只能转动一定的角度,这里说的舵机主要应用于航模、车模和监控等多种领域。之前提及的舵机一般是正负90度之间转动(连续旋转舵机除外),舵机内部是有直流电机,位置电位器和驱动反馈电路板组成,当需要舵机转到一定角度时,输入信号会与标准信号比较,如果反馈位置不是所需要的位置,电机则会朝向需要的方向转动,直到转到指定位置,电位器反馈信息促使电机停止转动。
舵机是一种位置伺服的驱动器,主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。其工作原理是由接收机或者单片机发出信号给舵机,其内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。经由电路板上的IC判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到达定位。适用于那些需要角度不断变化并可以保持的控制系统。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。一般舵机旋转的角度范围是0度到180度。
舵机有很多规格,但所有的舵机都有外接三根线,分别用棕、红、橙三种颜色进行区分,由于舵机品牌不同,颜色也会有所差异,棕色为接地线,红色为电源正极线,橙色为信号线。
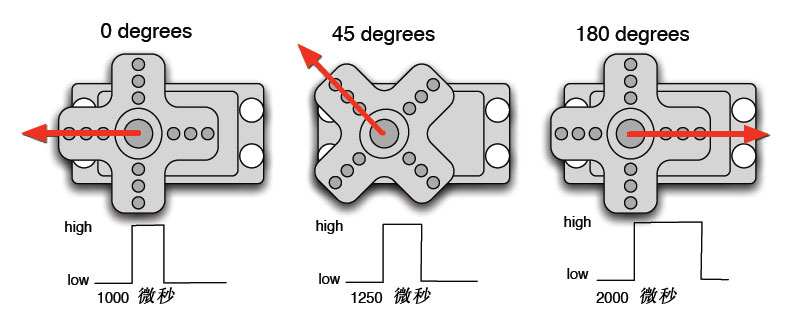
舵机的转动的角度是通过调节PWM(脉冲宽度调制)信号的占空比来实现的,标准PWM(脉冲宽度调制)信号的周期固定为20ms(50Hz),理论上脉宽分布应在1 ms到2 ms之间,但是,事实上脉宽可由0.5 ms到2.5 ms之间,脉宽和舵机的转角0°~180°相对应。有一点值得注意的地方,由于舵机牌子不同,对于同一信号,不同牌子的舵机旋转的角度也会有所不同。
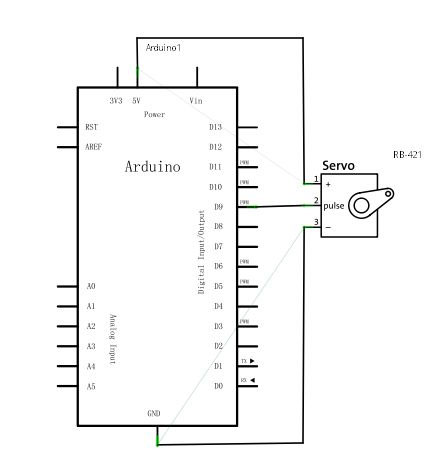
原理图
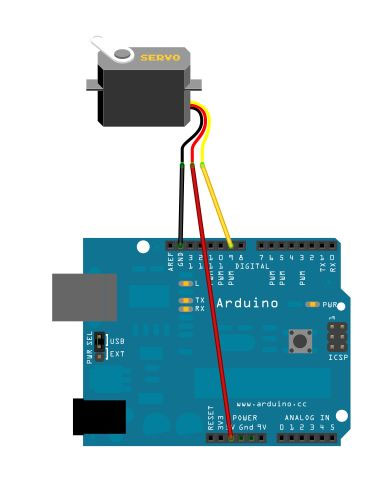
实物连接图
程序
#include <Servo.h>
Servo myservo; // 最多可以控制 8 路舵机
int pos = 0; // 用于存储舵机位置的变量
//初始化
void setup()
{
myservo.attach(9); // 舵机控制信号引脚
}
//主循环
void loop()
{
for (pos = 0; pos < 180; pos += 1) // 从 0 度-180 度
{ // 步进角度 1 度
myservo.write(pos); // 输入对应的角度值,舵机会转到此位置
delay(15); // 15ms 后进入下一个位置
}
for (pos = 180; pos >= 1; pos -= 1) // 从 180 度-0 度
{
myservo.write(pos); // 输入对应的角度值,舵机会转到此位置
delay(15); // 15ms 后进入下一个位置
}
}
Arduino自带的Servo函数及其语句中舵机函数的几个常用语句:
1、attach(接口)——设定舵机的接口,只有数字9或10接口可利用。
2、write(角度)——用于设定舵机旋转角度的语句,可设定的角度范围是0°到180°。
3、read()——用于读取舵机角度的语句,可理解为读取最后一条 write()命令中的值。
4、attached()——判断舵机参数是否已发送到舵机所在接口。
5、detach()——使舵机与其接口分离,该接口(数字 9 或 10 接口)可继续被用作PWM接口。
发布时间:2019/8/2 21:18:46 阅读次数:6446