第六章 2 传感器的应用
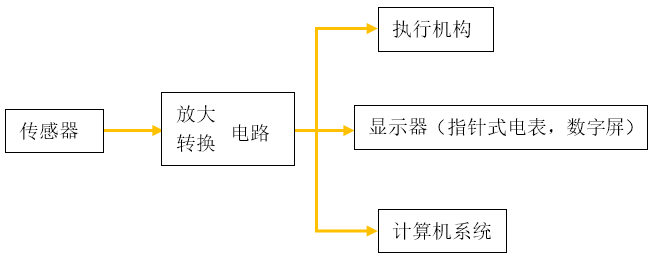
传感器输出的电信号相当微弱,难以带动执行机构去实现控制动作,因此要把这个电信号放大。如果需要远距离传送,可能还要把它转换成其他电信号以抵御外界干扰。
从传感器获得信号后,可以用指针式电表或液晶板等显示测量的数据;也可以用来驱动继电器或其他元件,来执行诸如打开管道的阀门、开通或关闭电动机等动作;还可以由计算机对获得的数据进行处理,发出更复杂的指令。
概括起来,传感器应用的一般模式可以用图6.2-1表示。
下面是几个应用的实例。
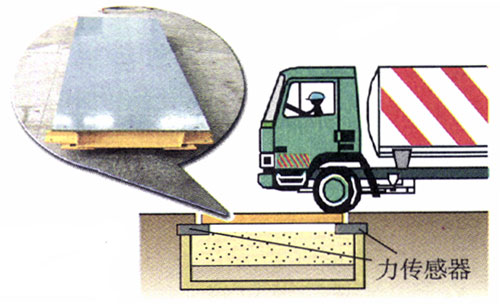
力传感器的应用——电子秤
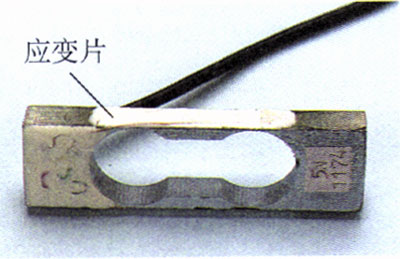
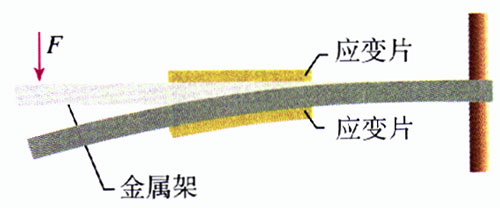
我们经常见到电于秤,小的用来称量食品的重量,大的可以称量汽车、火车的重量。它所使用的测力装置是力传感器。常用的一种力传感器是由金属梁和应变片组成的,如图6.2-2所示。应变片是一种敏感元件,现在多用半导体材料制成。这种传感器的工作原理如图6.2-3所示:弹簧钢制成的梁形元件右端固定,在梁的上下表面各贴一个应变片,在梁的自由端施力F,则梁发生弯曲,上表面拉伸,下表面压缩,上表面应变片的电阻变大,下表面的电阻变小。力F越大,弯曲形变越大,应变片的电阻变化就越大。如果让应变片中通过的电流保持恒定,那么上面应变片两端的电压变大,下面应变片两端的电压变小。传感器把这两个电压的差值输出。力F越大,输出的电压差值也就越大。
除了重力之外,应变式力传感器也用来测量其他各种力,如汽车和卷扬机的牵引力等。《物理1必修》课本中“用传感器探究作用力和反作用力的关系”的实验使用的就是这种传感器。
应变片能够把物体形变这个力学量转换为电压这个电学量。
温度传感器的应用——电熨斗
电熨斗在达到设定的温度后就不再升温,当湿度降低时又会继续加热,使它总与设定的温度相差不多。在熨烫不同的织物时,设定的温度可以不同。进行这样的控制,靠的是温度传感器。
实验
取一个报废的日光灯启动器,去掉外壳,在充有氖气的玻璃泡内,可以看到一个U形的双金属片。双金属片的旁边有一根直立的金属丝,两者构成一对触点。常温下触点是分离的。
敲碎氖泡的玻璃,用火焰靠近双金属片,双金属片的形状发生变化,与金属丝接触;把火焰移开,双金属片逐渐恢复原状,两个触点分离。
把这个启动器用做温控开关,可以控制小灯泡的亮和灭。

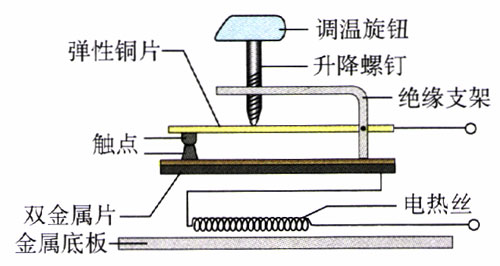
电熨斗为什么能够自动控制温度?原来许多电熨斗也装有双金属片温度传感器。这种传感器的作用是控制电路的通断。
图6.2-6为电熨斗的结构图。图中双金属片上层金属的热膨胀系数大于下层金属。
思考与讨论
常温下,图6.2-6中电熨斗的上下触点应当是接触的还是分离的?当温度过高时双金属片将怎样起作用?
熨烫棉麻衣物需要设定较高的温度,熨烫丝绸衣物需要设定较低的温度。这是如何利用调温旋钮来实现的?
温度传感器的应用——电饭锅
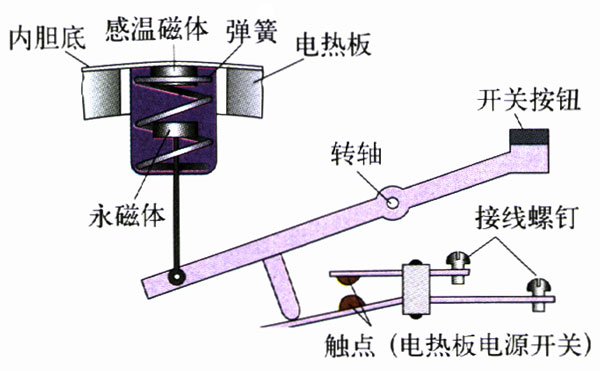
电饭锅中也应用了温度传感器,它的主要元件是感温铁氧体。感温铁氧体是用氧化锰、氧化锌和氧化铁粉末混合烧结而成的,它的特点是:常温下具有铁磁性,能够被磁体吸引,但是温度上升到约103℃时,就失去了铁磁性,不能被磁体吸引了。这个温度在物理学中称为该材料的“居里温度”或“居里点”。
演示
取一块电饭锅用的感温铁氧体,使它与一块小的永磁体吸在一起。用功率较大的电烙铁给铁氧体加热,经过一段时间后会发生什么现象?
感温铁氧体可以用收音机中的磁棒代替。这种磁棒也是铁氧体,居里点也是比100℃略高一些。
电饭锅的结构如图6.2-7所示。
思考与讨论
1.开始煮饭时为什么要压下开关按钮?手松开后这个按钮是否会恢复到图示的状态?为什么?
2.煮饭时水沸腾后锅内是否会大致保持一定的温度?为什么?
3.饭熟后,水分被大米吸收,锅底的温度会有什么变化?这时电饭锅会自动地发生哪些动作?
4.如果用电饭锅烧水,能否在水沸腾后自动断电?
光传感器的应用——火灾报警器
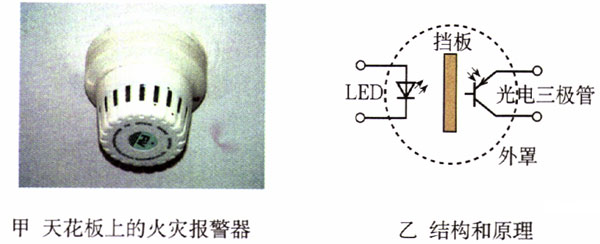
许多会议室和宾馆房间的天花板上都装有火灾报警器。
有一种火灾报警器是利用烟雾对光的散射来工作的。如图6.2-8所示,带孔的罩子内装有发光二极管LED、光电三极管[1]和不透明的挡板。平时,光电三极管收不到LED发出的光,呈现高电阻状态。烟雾进入罩内后对光有散射作用,使部分光线照射到光电三极管上,其电阻变小。与传感器连接的电路检测出这种变化,就会发出警报。
实验
测量光照的强度
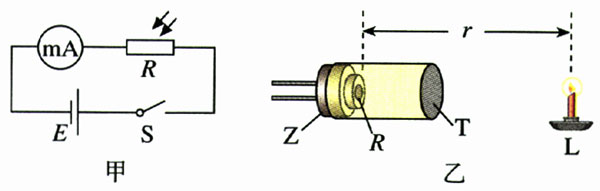
把光敏电阻、多用表的直流电流挡和干电池按照图6.2-9甲连成电路,这样就能对光照的强度进行比较性测量。光敏电阻受到的光照越强,电路中的电流越大。
白天,将它放在教室中适合阅读的地方,记下电流表的读数。晚上,用它来检测灯光对书桌的照明。比较两者的差别。
还可以按照图6.2-9乙,把光敏电阻R的引脚穿过硬泡沫塑料板Z而固定,再罩上内壁涂黑、长度足够的遮光筒T,避免杂散光的干扰。然后分别把不同的光源L(如蜡烛、几种不同功率的白炽灯泡、日光灯管等)都放在与光敏电阻相同距离(例如1 m)的位置,比较它们的亮度。
这个实验也可以用硅光电池来做。由于光电池在受到光照时可以自己产生电动势,所以电路中不用电源。
想一想,怎样用图6.2-9的装置来制作一个摄影用的曝光表?
科学漫步
机器人
1920年,捷克斯洛伐克作家卡佩克在一本科幻小说中构思了一个机器人,名字叫Robot,他可以不吃饭,却能不知疲倦地工作,展现了人类持续多年的一种愿望。
1947年世界上第一个机器人在美国诞生,这是一台为反应堆搬运核燃料的简单机器,代替人来从事危险的工作。此后由于现代制造业的需求,有关机器人的研究迅速发展起来。
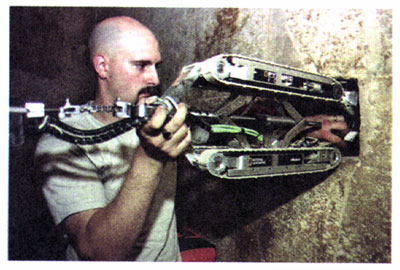
我们常常根据机器人的结构和功能把它们粗略地分为几代。第一代机器人只能按照编好的程序,由内部的计算机安排它的动作,对外界没有感知,例如汽车生产线上用于点焊的机器人。第二代机器人有了感觉,它的身上安装了传感器,起到人的感官的作用。例如利用光传感器能让机器人沿着地面上画出的白色轨迹运动,利用图像传感器能让机器人产生视觉来识别烧杯和铁块。当它的手拿着烧杯时,力传感器会使手指感知压力和滑动从而既能拿住又不会捏碎。第三代是智能机器人,是人们梦寐以求的,也正是当前在努力发展的。它以人工智能理论和现代信息技术为基础.能够自主地从经验中学习,不断完善自身的程序,增强自己的功能。
机器人的种类很多,应用最广泛的是工业机器人,它们大多数是第一代机器人。目前全世界已经有约100万台工业机器人在使用中,它们把人从繁重的体力劳动和危险的环境中解放出来,极大地提高了生产率。
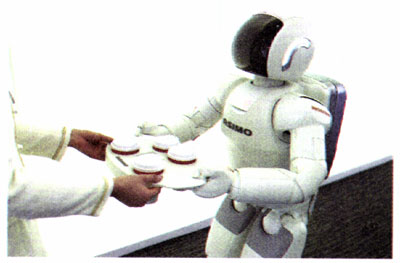
第二类是服务型机器人,用于清洁、加油、导盲、抢险等方面,它们大多数是第二代机器人,具有一个移动平台,其上有操作臂,还安装了触觉、视觉、听觉及超声测距等传感器,能够识别周边的环境、判断自己的运动。医疗机器人是近几年来发展迅速的一个新的领域。医疗机器人能够帮助医生做复杂的手术,减轻了人的疲劳,保证了手术的精确和成功。空间机器人是最复杂、最昂贵的机器人,用于探测太空。它们的典型代表是“勇气号”火星探测器。
需求促进了机器人技术和产业的发展。展望21世纪,机器人将与20世纪计算机的普及一样,深入地应用到各个领域。21世纪的前20年,是机器人应用从制造业领域走向非制造业的重要时期,也是智能机器人发展的关键时期。1986年我国启动了“863”高技术发展计划,机器人技术是其中一个重要的主题。在水下、空间、核工业等一些特殊机器人的制造方面,我国取得了很多有特色的研究成果。
问题与练习
1.某同学设计了一个加速度计,如图6.2-10所示。较重的滑块2可以在光滑的框架1中平移,滑块两侧用弹簧3拉着;R为滑动变阻器,4是滑动片,它与电阻器任一端间的电阻值都与它到这端的距离成正比。这个装置实际上是一个加速度传感器。
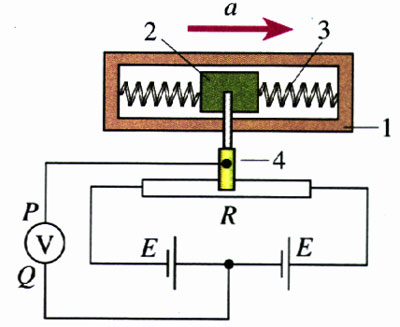
两个电池E的电压相同。按图连接电路后,电压表指针的零点调在中央,当P端的电势高于Q端时,指针向零点右侧偏转。
你认为他的设计在原理上可行吗?将框架固定在运动的物体上,当物体具有图示方向的加速度a时,电压表的指针将向哪个方向偏转?
2.如图6.2-11所示,图甲为热敏电阻的R-t图象,图乙为用此热敏电阻R和继电器组成的一个简单恒温箱温控电路,继电器线圈的电阻为150 Ω。当线圈中的电流大于或等于20 mA时,继电器的衔铁被吸合。为继电器线圈供电的电池的电动势E=6V,内阻可以不计。图中的“电源”是恒温箱加热器的电源。
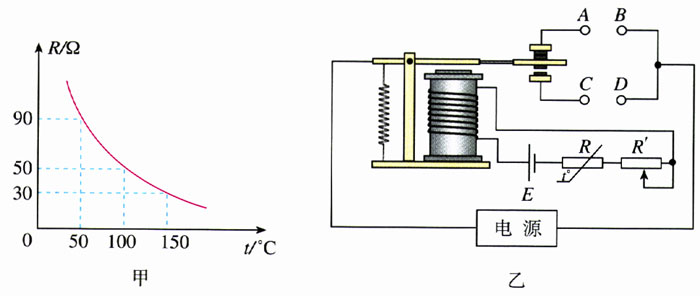
(1)应该把恒温箱内的加热器接在A、B端还是C、D端?
(2)如果要使恒温箱内的温度保持100 ℃,可变电阻R′的值应调节为多少?
3.许多楼道灯具有这样的功能:天黑时,出现声音它就开启,而在白天,即使有声音它也没有反应。
(1)它的控制电路中接入了哪几种传感器?
(2)从这几种传感器来的信号,通过一个门电路后,进入执行电路。应该使用哪种门电路?
4.当前大量使用的磁敏器件是霍尔元件与集成电路制在一起的磁传感器,它有以下两种。
(1)一种是“线性”的。它将霍尔元件和放大器集成在一个芯片内,其输出的电压与感受到的磁感应强度成正比地连续变化。请你提出一种方案,利用它来测量电流的大小。
(2)另一种是“开关型”的,当磁场强到一定程度时它才会输出高电平,而在磁场弱到一定程度时输出低电平[2](或者相反),也就是说,它只能在高、低电平之间跃变。请你提出一种方案,利用它来测量物体的转速。
文件下载(已下载 90 次)发布时间:2017/8/24 20:28:41 阅读次数:1830