第九章 E 学习包——自动控制与模块机器人
本学习包的学习过程建议分三个阶段进行。
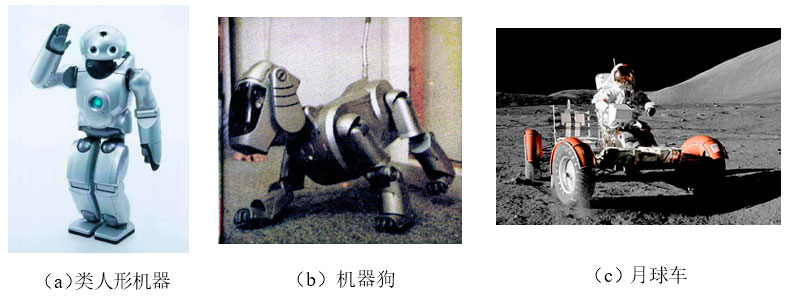
你一定不会对“机器人”感到陌生吧!类人形机器人、宠物机器狗、月球车(图9-39),实际上它们已经活跃在我们的周围。机器人不一定非要有类似人一样的形状。程序可变的全自动洗衣机、有感知的银行取款机、不依赖人操纵的磁浮列车,这些有一定智能的自动控制装置,说它们是机器人也不过分。
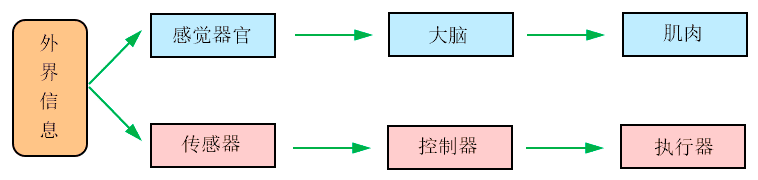
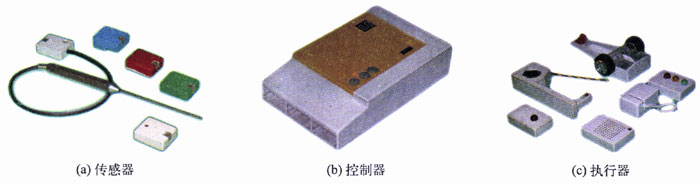
机器人由传感器、控制器和执行器三个模块组成,相当于人的感觉器官、大脑和肌肉(图9-40)。
第一阶段:问题探讨
一、模块机器人表演
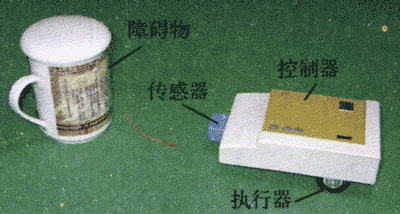
图9-41是我们用机器人模块组合而成的“有视觉机器人”。它装有作为眼睛的“传感器”、犹如大脑的“控制器”,以及可以行走的“执行器”。在它碰到障碍物前会自动避让并及时转弯。
二.提出问题、任务
在这个学习包里,你将会学到机器人由哪些模块电路组成,以及各个模块电路的作用。
学习包提供可组合成机器人的模块电路,利用有限模块组合成具有各种功能的机器人,我们称它为“模块机器人”。
学习包提供的资料,将会使你感受到机器人世界的精彩。
1.模块机器人由哪些模块组成?
2.生活中你接触过哪些自动控制设备和装置?
3.机器人已经广泛应用于人类生活的各个领域。请你罗列一下机器人在工农业、军事、服务、娱乐、教育等方面的应用实例。
4.“DIS实验”中,我们应用过哪些传感器?这些传感器分别起什么作用?观察身边的家用电器,都应用了哪些传感器?
5.敏感元件是传感器中的核心部件。常用的敏感元件有几种?你能分别说出它们的基本工作原理吗?
三、阅读资料,收集信息
利用网上检索到的和课本中所提供的资料,整理归纳,探讨上述提出的问题和任务,并进行交流。有些问题可在实验探索、课题研究后进行探讨。
第二阶段:实验探究
一、【学生实验】设计、组装简单的模块式电路
1.传感器实验
在模块机器人的传感器模块电路中,起主要作用的是敏感元件。我们先利用几种敏感元件进行实验,然后再用模块机器人中的传感器模块电路研究其在机器人中的作用。
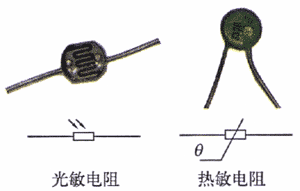
(1)图9-42所示为光敏电阻和热敏电阻的外形和符号。用多用电表测量光敏电阻,在有光照和遮光时,观察它的电阻值有什么变化?用同样方法测量热敏电阻,在温度升高和温度降低时,观察它的电阻值有什么变化?
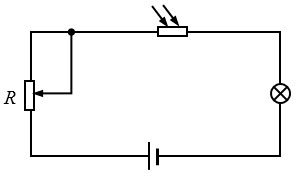
(2)按图9-43所示连接电路,当光敏电阻被遮盖和移去遮盖物时,观察小灯泡的发光情况发生什么变化?
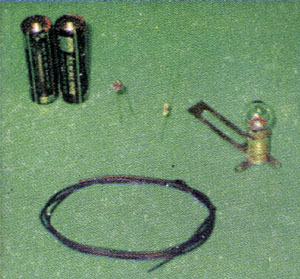
(3)用图9-44所示的器材(热敏电阻、小灯泡、电池、可变电阻、连接导线),自行设计一个用热敏电阻控制小灯泡的电路,使温度升高时小灯点亮,温度降低时小灯熄灭。
(4)组装一个用不同传感器(如光传感器、声传感器、温度传感器)控制小灯泡的模块机器人,观察各种传感器对小灯泡的控制作用。
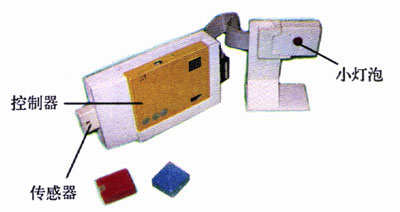
图9-45所示为控制器采用“即时控制方式”,执行器采用小灯泡,可更换不同传感器的实验装置。
2.控制器实验
在逻辑电路中,我们学习了门电路的工作原理,下面利用模块机器人中的控制器模块电路进一步进行实验。
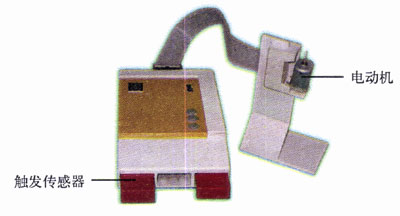
(1)“洗衣机”开关。洗衣机通常采用与门电路,一个开关是电源开关,另一个开关由洗衣机的盖子来控制。只有当电源开关和洗衣机盖子同时闭合时,洗衣机电源才能接通。请你来组合这种控制电路(传感器选用两个触发传感器,控制器选择与门控制方式,执行器选用电动机)。
图9-46所示为组装的“洗衣机”控制电路实例。
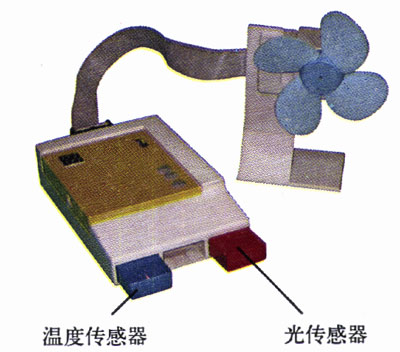
(2)自动温控。自定一个课题,要求控制器采用或门控制方式来组装一个自动控制装置(传感器模块和执行器模块可根据课题自行选择)。
图9-47所示为一个有光照或温度升高时排气风扇都能启动的自动控制装置。这个装置需要光传感器和温度传感器,控制器采用或门控制方式,执行器选用电风扇。
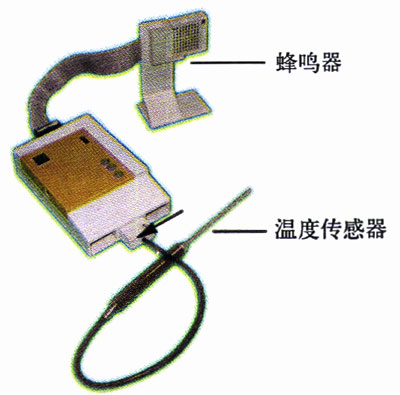
(3)火警报警。我们曾经分析过,应用非门构成简易火警报警器的原理,请组装一台类似的火警报警器。
调节温度传感器上的电阻器,观察报警器的灵敏度会发生怎样的变化?
图9-48所示为组装的火警报警器。
3.执行器实验
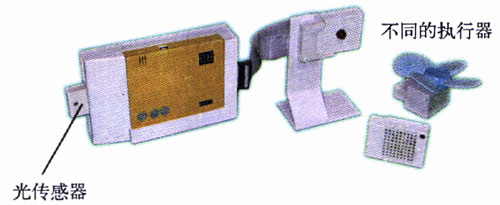
用“不同的执行器”组装模块机器人:选定一个传感器和一种控制方式,然后采用几种不同执行器,如灯、风扇、蜂鸣器等,观察实验结果。
图9-49所示为用光传感器和“即时控制方式”的实验装置。当光传感器电路受光照和无光照时,其不同执行器可显示灯亮、风扇转动、蜂鸣器发声等功能。
二、成立课题组,分组设计模块机器人
1.提出设计方案
课题设计的主要器材可以是“学习包”所提供的“机器人”模块,也可利用实验室或家庭已有的器材进行探索研究。
(1)课题名称。
“课题”可以自己选择或与同学一起拟定,也可与老师合作拟定。
_____________________________________________________________
(2)模块选择。
模块选择要根据课题要求和现有的模块来决定,在表格空白处填写选定的模块。
|
传感器模块 |
控制器模块(控制方式) |
执行器模块 |
|
|
|
|
2.组装模块机器人
组装前可与同学一起查阅有关资料,进行讨论。把具体的实验步骤简述在下面空白处。
3.撰写小论文
小论文内容可包括:在模块机器人组装过程中对其结构的认识和理解;完成课题设计意图后的喜悦以及团队协作精神的体验;对具有无限开发潜力的模块“机器人”进行永无止境的挑战激情……
第三阶段:课题研究
成果展示,交流,小结
课题研究完成后,可把作品在全班展示评选,也可交流撰写的小论文。作品展示形式可选:评比、竞赛、展览…
展示和交流简述
参考资料
(一)相关网站
有关自动控制和机器人的网站很多,可通过百度、雅虎、Google等搜索引擎,搜索“机器人”“自动控制”“微处理器”“传感器”“逻辑电路”“模块电路”等关键词,选取所需网站,检索你所需的相关资料,并可下载摘录,以备需要时采用。
(二)相关知识
1.自动控制和机器人
机器人是20世纪人类的伟大发明之一。当今机器人已活跃在天空、地面、海底,从工业、农业拓展到教育、娱乐等领域,甚至进入寻常百姓家。未来,人类将会创造更好的机器人。
机器人的进化
第一代:工业机器人
1960年出现了工业机器人。它们是具有最低智能的操作器,能成功地模拟人类的某些简单动作,可完成预定的作业。
图9-50所示为自动装配机械手。

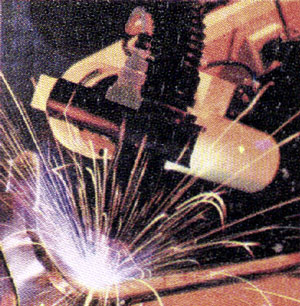
第二代:感觉机器人
如果给机器人配备了各种传感器,机器人就能够获取作业环境、操作对象的简单信息,通过计算机处理、分析,做出一定的推理,对动作进行控制。
图9-51所示为焊接机器人。
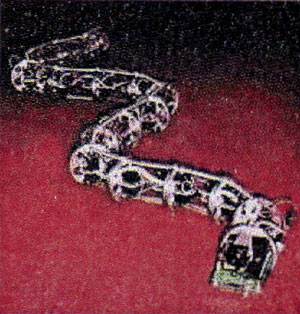
第三代:智能机器人
智能机器人是计算机功能和人工智能相结合的产物。它具有灵活的思维功能,有较强的自适应能力。有人称它们为高级机器人。现在已有很多智能机器人活跃在生产和高科技研究的各个领域中,它们是人类的新伙伴。
图9-52所示为我国研制的“机器蛇”。
2.传感器
传感器是一种能够将各种物理量、化学量、生物量等转化成电学量的器件(图9-53)。近年来,随着微处理器技术的发展,出现了具有能进行自动检测、判断和信息处理功能的智能化传感器。它同人工智能相结合,将成为传感器技术未来发展的主要方向。

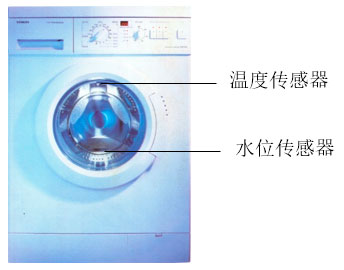
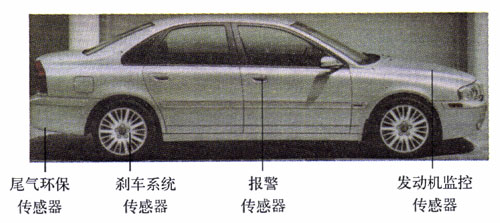
其实,传感器就在我们身边。例如,智能型洗衣机中安装的负荷传感器可测定电机的转动状况,水位传感器可测定水位的变化,光电传感器可检测水的浊度,压电传感器可测定衣物脱水的程度(图9-54)。空调、冰箱、电视机、DVD、电饭锅、数码照相机等家用电器上都有传感器。而现代汽车上的传感器甚至多达数十种,用于检测车速、方位、转矩、震动、油压、油量、温度、空气流量等数据(图9-55)。
3.微控制器
微控制器又称单片机(单片微型计算机)。微控制器的出现是计算机技术发展史上的一个重要里程碑,它使计算机从数值计算进入到智能化控制领域。目前微控制器除了应用于国防、科技、工农业生产外,已渗透到我们生活的各个领域。
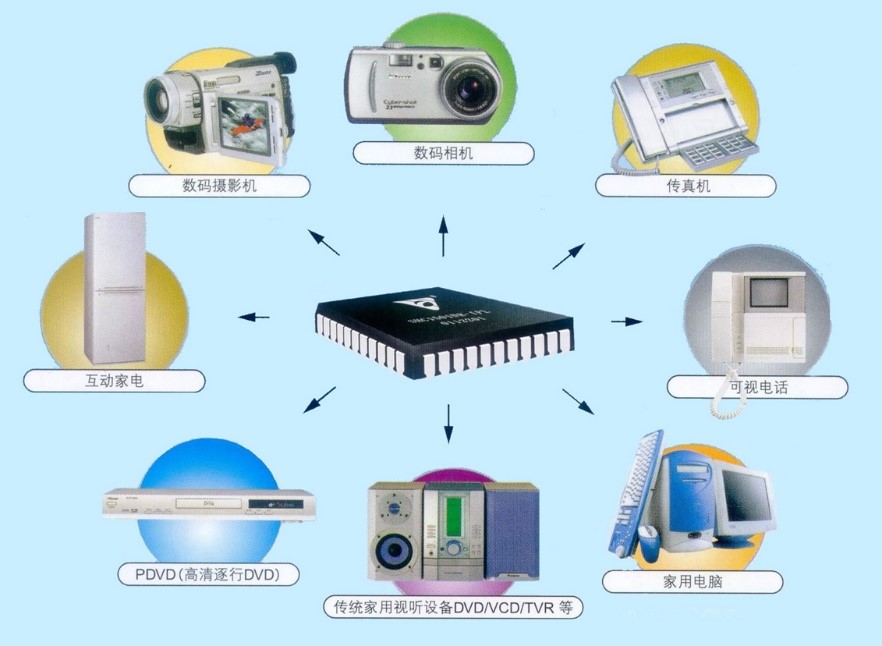
图9-56所示为应用微控制器的部分家用电器。
4.模块电路
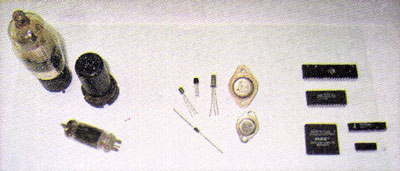
电子技术的迅猛发展,带来了电子器件的不断变化。真空管曾经主导了电子科技50年,而晶体管问世不到25年,又被集成电路取代,之后更大规模的集成电路不断涌现(图9-57)。
对绝大部分人而言,并非一定要去弄明白电路的内部结构,而只需要知道它所具有的功能。有时我们把具有某一特定功能的电路称为模块电路。将这些规模不一、功能各异的模块电路按照不同的需求进行各种组合,就形成了具有新功能的电路。
“模块电路组合”的思路促进了现代电路的不断创新,加快了新电路的开发和应用。只要我们了解每种基本模块电路的功能,以及不同模块电路之间的相互联系后,就可以根据课题要求将它们进行组合,以达到预期的目的。
5.模块机器人
模块机器人是根据模块电路组合的思路设计而成,它由传感器、控制器和执行器三类模块组成(图9-58)。
控制器是模块机器人的大脑。它的核心器件是微控制器。只要发挥设计者的想像力,将它与传感器、执行器巧妙地组合起来,就可设计出避障小车、循迹机器人、抛球机器人(图9-59),以及各种具有创意的发明,体验用有限的模块创造无限变化的乐趣。

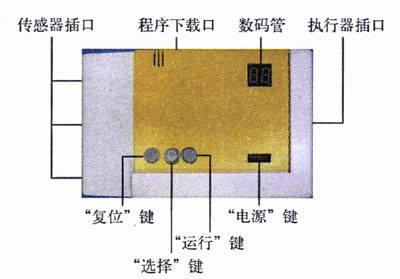
图9-60所示是控制器按键和插口的分布图。其中,“电源”键为控制器的电源开关。
|
序号 |
控制方式 |
|
01 |
即时 |
|
02 |
延时 |
|
03 |
与门 |
|
04 |
或门 |
|
05 |
非门 |
按动“选择”键,从数码管中显示的数字可选择控制方式(表12)。控制器中已存储五种不同的控制方式,并以“01”“02”“03" "04"‘05”的形式交替在数码管上显示出来。按动“运行”键,控制器根据所选定的控制方式开始运行程序。按动“复位”键,程序终止运行。
对于控制器的控制方式,我们还可以通过学习包所附光盘,选择各种功能的机器人程序,然后通过“程序下载口”下载到控制器中。同学们可以通过实验来研究一些实际问题,也可实施具有创意的发明。
详细内容请参阅“模块机器人使用说明书”。
英语角
What is electricity
Electricity is the form of energy that enables charged particles, such as electrons, to move. Moving charge is called current electricity. There are two types of current electricity, direct current (DC), which flows in one direction only, and alternated current (AC), which changes many times every second. Charge that does not move, called static electricity, is a form of potential energy. Electricity is highly versatile because it can be carried over long distances and converted easily into many other forms of energy.
文件下载(已下载 149 次)发布时间:2016/10/15 下午9:13:10 阅读次数:778
