3.5 转换矩阵与坐标转换矩阵的对比
在前面的几节中,我们已经区分了active变换(缩放、旋转和平移)和坐标转换变换。本节我们将会证明两者在数学上是等价的,一个active变换可以解释为一个坐标转换变换,反之亦然。
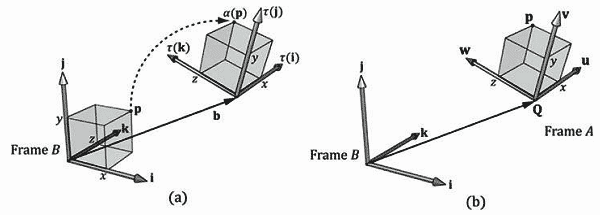
图3.15说明了公式3.7中的行向量(仿射矩阵变换实现的平移加旋转)与公式3.9中的行向量(坐标转换矩阵)的相似之处。
这是说得通的。在坐标转换变换的情况中,参考系的位置和朝向都是不同的。所以,将一个参考系变换到另一个参考系的数学方程需要旋转和平移坐标,最终我们会得到相同的数学形式。无论哪种情况,我们都会得到相同的数字;区别只是在于我们解释变换的方式。在某些情况下,使用多个坐标系统更符合思维习惯,我们可以让物体自身保持不变,只是从一个参考系转换到另一个参考系,由于参考系发生了改变,因此物体的坐标也会随之改变(这种情况对应图3.15b)。在另一些情况中,我们不想改变参考系,而只想在同一个参考系中对物体进行变换(这种情况对于图3.15a)。
注意:上述讨论表明,我们可以将一个active变换组合(缩放,旋转,平移)解释为坐标系转换。这一点很重要,因为我们常常会将世界空间(第5章)的坐标变换矩阵定义为一个缩放、旋转、平移变换的组合。
文件下载(已下载 487 次)发布时间:2014/10/7 20:37:48 阅读次数:7519