1.3 点积
点积(dot product)是向量乘法的一种形式,它的计算结果是一个标量值;由于这一原因,有时也将点积称为标量积(scalar product)。设u=(ux,uy,uz),v=(vx,vy,vz),则点积定义如下:
\({\bf{u}} \cdot {\bf{v}} = {u_x}{v_x} + {u_y}{v_y} + {u_z}{v_z}\) (1.3)
简言之,点积等于两个向量对应分量的乘积之和。点积的定义不存在任何明显的几何含义。但是,使用余弦定理可以发现存在如下关系:
\({\bf{u}} \cdot {\bf{v}} = \left\| {\bf{u}} \right\|\left\| {\bf{v}} \right\|\cos \theta \) (1.4)
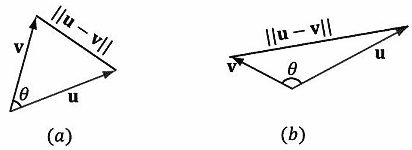
其中,θ表示向量u和v之间的夹角,且0≤θ≤π(参见图1.9)。公式1.4说明这两个向量的点积等于向量夹角的余弦值和向量模之间的乘积。在特殊情况下,如果u和v都是单位向量,那么u∙v就等于它们之间夹角的余弦值(即,u∙v=cosθ)。
公式1.4提供了一些有用的点积的几何性质:
1.如果u∙v=0,则u⊥v(即,向量相互垂直)。
2.如果u∙v>0,则两个向量之间的夹角θ小于90º(即,向量形成一个锐角)。
3.如果u∙v<0,则两个向量之间的夹角θ大于90º(即,向量形成一个钝角)。
注意:“相互垂直”也可称为“互成直角”。
【例1.4】
设u=(1, 2,3)、v=(−4, 0, −1)。求u和v之间的夹角。首先,我们要做如下计算:
\(\begin{array}{l}{\bf{u}} \cdot {\bf{v}} = (1,2,3) \cdot ( - 4,0, - 1) = - 4 - 3 = - 7\\\left\| {\bf{u}} \right\| = \sqrt {{1^2} + {2^2} + {3^3}} = \sqrt {14} \\\left\| {\bf{v}} \right\| = \sqrt {{{( - 4)}^2} + {0^2} + {{( - 1)}^2}} = \sqrt {17} \end{array}\)
现在,由公式1.4解得θ为:
\(\begin{array}{l}\cos \theta = \frac{{{\bf{u}} \cdot {\bf{v}}}}{{\left\| {\bf{u}} \right\|\left\| {\bf{v}} \right\|}} = \frac{{ - 7}}{{\sqrt {14} \sqrt {17} }}\\\theta = {\cos ^{ - 1}}\frac{{ - 7}}{{\sqrt {14} \sqrt {17} }} \approx 117^\circ \end{array}\)
【例 1.5】
考虑图1.10。给出v和单位向量n,推导出一个使用点积求解向量p的公式。
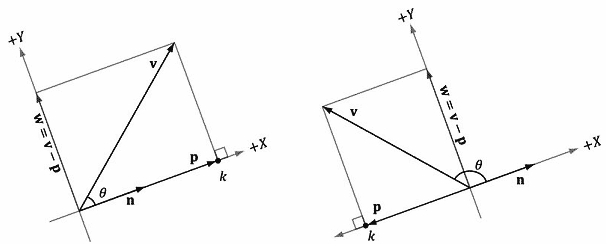
首先,从该图中可以看到标量k可以使p=kn;而且,由于我们已知‖n‖=1,所以有‖p‖=‖kn‖=| k|‖n‖=|k|。(注意,当且仅当p与n的方向相反时,k为负数。)我们使用三角函数,可以得出k=‖v‖cosθ;由此,p=kn=(‖v‖cosθ)n。不过,因为n是一个单位向量,所以我们可以用另一种方式进行表达:
\[{\bf{p}} = (\left\| {\bf{v}} \right\|\cos \theta ){\bf{n}} = (\left\| {\bf{v}} \right\| \cdot 1\cos \theta ){\bf{n}} = (\left\| {\bf{v}} \right\| \cdot \left\| {\bf{n}} \right\|\cos \theta ){\bf{n}} = ({\bf{v}} \cdot {\bf{n}}){\bf{n}}\]
请注意,这里的k=v∙n,它说明了当n为单位向量时v∙n的几何含义。我们将p称为v在n上的正交投影(orthogonal projection),并记为
\[{\bf{p}} = pro{j_{\bf{n}}}({\bf{v}})\]
如果我们把v理解为一个作用力,那么p可以被认为是v在方向n上的分力。同理,向量w=perpn(v)=v−p是与n垂直方向上的分力。可以看到v=p+w,这说明我们已经将向量v分解成了两个相互垂直的向量p和w。如果n不是一个单位向量,那我们可以对它进行规范化,使其保持单位长度。通过用单位向量\(\frac{{\bf{n}}}{{\left\| {\bf{n}} \right\|}}\)来代替n,可以得到一个更通用的投影公式:
\[{\bf{p}} = pro{j_{\bf{n}}}({\bf{v}}) = ({\bf{v}} \cdot \frac{{\bf{n}}}{{\left\| {\bf{n}} \right\|}})\frac{{\bf{n}}}{{\left\| {\bf{n}} \right\|}} = \frac{{({\bf{v}} \cdot {\bf{n}})}}{{{{\left\| {\bf{n}} \right\|}^2}}}{\bf{n}}\]
1.3.1 正交化
若一个向量集合{v0,……,vn-1 }中的向量相互正交(即集合中的每一个向量与其他向量正交)并具有单位长度,我们将这个集合称之为规范化正交集。有时一组向量几乎是正交的,但又不完全是,一个常见的任务就是使其正交。在三维计算机图形中,开始时通常是一个规范化正交的向量集合,但由于计算精度问题,这个集合就会逐渐成为非规范化的了。我们主要关心的是2D和3D的情况下任何处理这个问题(即,含有两个和三个向量的情况)。
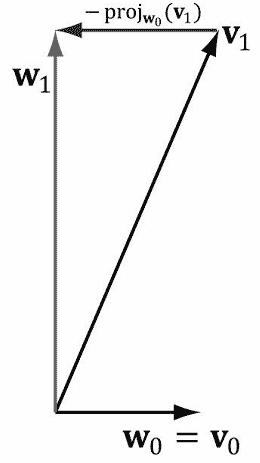
首先讨论简单的2D情况。假设有一组向量为{v0,v1},我们要将它们正交到一个规范正交集{w0,w1}中,如图1.11所示。首先令w0=v0,然后修改v1使它与w0垂直;这需要减去v1向量在w0上的投影:
w1= v1- projw0(v1)
现在就有了一组互相垂直的向量{w0,w1};最后需要规范化w0和w1才能构建规范化的正交集。
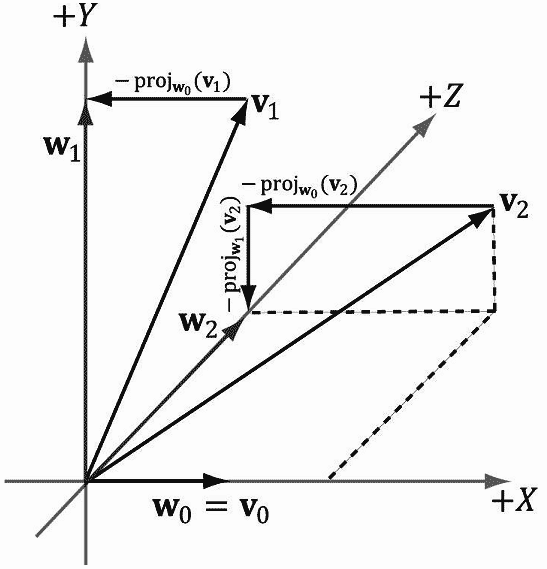
3D情况的原理与2D相同,但需要更多的步骤。假设有一组向量{v0,v1,v2}需要正交规范化到{w0,w1,w2},如图1.12所示。首先令w0=v0,然后修改v1使之垂直于w0;这需要从v1中减去v1在w0方向上的投影:
w1= v1- projw0(v1)
下一步需要令v2同时垂直于w0和w1,这需要从v2中减去v2在w0上的投影再减去v2在w1上的投影:
w2= v2- projw0(v2) - projw1(v2)
现在就有了一组互相垂直的向量{w0,w1,w2};最后需要规范化w0、w1和w2才能构建规范化的正交集。
要规范正交化任意数量的向量集{v0,…,vn-1},我们需要按照通常叫做>Gram-Schmidt正交化(http://zh.wikipedia.org/wiki/格拉姆-施密特正交化)的处理过程进行:
基本步骤:令w0=v0
for 1 ≤ i ≤ n-1,令\({{\bf{w}}_i} = {{\bf{v}}_i} - \sum\limits_{j = 0}^{i - 1} {pro{j_{{\bf{wj}}}}({{\bf{v}}_{\bf{i}}})} \)
规范化步骤:令\({{\bf{w}}_i} = \frac{{{{\bf{w}}_i}}}{{\left\| {{{\bf{w}}_i}} \right\|}}\)
原理与上面是类似的,当选取一个向量vi将它添加到规范化的正交集时,我们需要减去这个向量在正交集中其他向量(w0,w1,…,wi-1)上的投影,这样可以确保这个新添的向量与正交集中的其他向量垂直。
文件下载(已下载 658 次)发布时间:2014/9/8 20:15:03 阅读次数:6832