5.10 光栅化阶段
光栅化(rasterization)阶段的主要任务是为投影后的3D三角形计算像素颜色。
5.10.1 视口变换
在裁剪之后,硬件会自动执行透视除法,将顶点从齐次裁剪空间变换到规范化设备空间(NDC)。一旦顶点进入NDC空间,构成2D图像的2D x、y坐标就会被变换到后台缓冲区中的一个称为视口的矩形区域内(回顾4.2.8节)。在该变换之后,x、y坐标将以像素为单位。通常,视口变换不修改z坐标,因为z坐标还要由深度缓存使用,但是我们可以通过D3D11_VIEWPORT结构体的MinDepth和MaxDepth值修改z坐标的取值范围。MinDepth和MaxDepth的值必须在0和1之间。
5.10.2 背面消隐
一个三角形有两个面。我们使用如下约定来区分这两个面。假设三角形的顶点按照v0、v1、v2的顺序排列,我们这样来计算三角形的法线n:
e0 = v1 - v0
e1 = v2 – v1
\({\bf{n}} = \frac{{{{\bf{e}}_0} \times {{\bf{e}}_1}}}{{\left\| {{{\bf{e}}_0} \times {{\bf{e}}_1}} \right\|}}\)
带有法线向量的面为正面,而另一个面为背面。图5.30说明了这一概念。
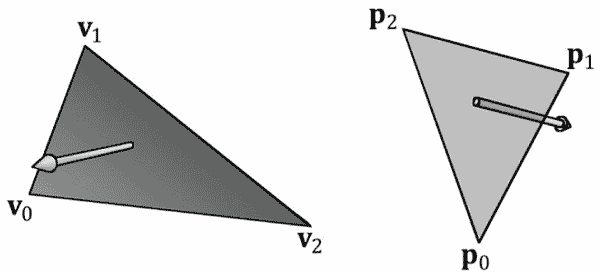
当观察者看到三角形的正面时,我们说三角形是朝前的;当观察者看到三角形的背面时, 我们说三角形是朝后的。如图5.30所示,左边的三角形是朝前的,而右边的三角形是朝后的。而且,按照我们的观察角度,左边的三角形会按顺时针方向环绕,而右边的三角形会按逆时针方向环绕。这不是巧合:因为按照我们选择的约定(即,我们计算三角形法线的方式),按顺时针方向环绕的三角形(相对于观察者)是朝前的,而按逆时针方向环绕的三角形(相对于观察者)是朝后的。
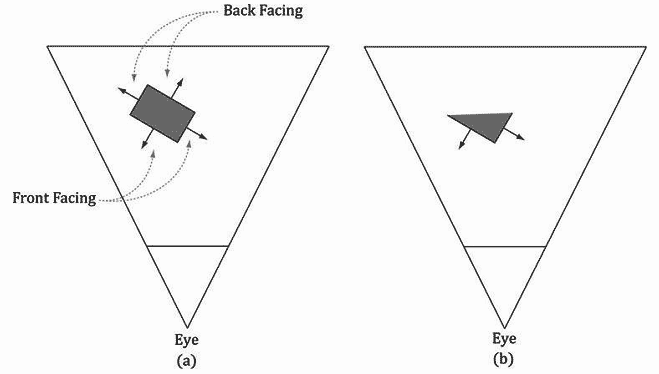
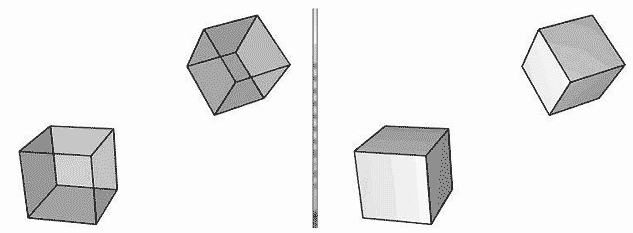
现在,3D空间中的大部分物体都是封闭实心物体。当我们按照这一方式将每个三角形的法线指向物体外侧时,摄像机就不会看到实心物体朝后的三角形,因为朝前的三角形挡住了朝后的三角形;图5.31和图5.32分别以2D和3D形式说明了一概念。由于朝前的三角形挡住了朝后的三角形,所以绘制它们是毫无意义的。背面消隐(backface culling)是指让管线放弃对朝后的三角形的处理。这可以将所要处理的三角形的数量降低到原数量的一半。
默认情况下,Direct3D将(相对于观察者)顺时针方向环绕的三角形视为朝前的三角形,将(相对于观察者)逆时针方向环绕的三角形视为朝后的三角形。不过,这一约定可以通过修改Direct3D渲染状态颠倒过来。
5.10.3 顶点属性插值
如前所述,我们通过指定三角形的3个顶点来定义一个三角形。除位置外,顶点还可以包含其他属性,比如颜色、法线向量和纹理坐标。在视口变换之后,这些属性必须为三角形表面上的每个像素进行插值。顶点深度值也必须进行插值,以使每个像素都有一个可用于深度缓存算法的深度值。对屏幕空间中的顶点属性进行插值,其实就是对3D空间中的三角形表面进行线性插值(如图5.33所示);这一工作需要借助所谓的透视矫正插值(perspective correct interpolation)来实现。本质上,三角形表面内部的像素颜色都是通过顶点插值得到的。
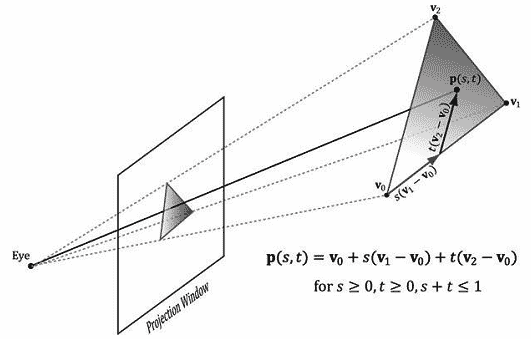
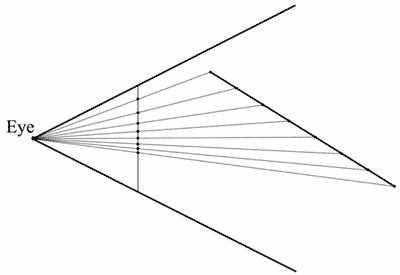
我们不必关心透视精确插值的数学细节,因为硬件会自动完成这一工作;不过,有兴趣的读者可以在[Eberly01]中查阅相关的数学推导过程。图5.34介绍了一点基本思路:
发布时间:2014/7/29 20:34:10 阅读次数:7638