第六章 简谐运动与机械波参考资料
1.关于简谐运动的定义
简谐运动的定义,常见的有以下三种:
(1)根据运动学的特征来定义:物体对平衡位置的位移随时间作余弦(或正弦)变化的运动,叫做简谐运动,即
x=Acos(ωt+ϕ);
(2)根据力的特征来定义:物体在线性回复力作用下的运动是简谐运动,线性回复力
F=-kx;
(3)采用运动微分方程来定义:简谐运动遵从的微分方程为
\(\frac{{{d^2}x}}{{d{t^2}}} + {\omega ^2}x = 0\)。
对于这三种定义,作以下讨论。
①定义(1)着眼于运动特征。但是,在随时间作余弦变化的策动力作用下的稳定受迫振动的规律
x=Acos(ωft-ϕ);
(其中A表示振幅,ϕ表示稳定受迫振动比策动力落后的相位,ωf为策动力变化的角频率)也同样是“位移x随时间作余弦变化”,然而它不属于简谐运动,这是因为余弦或正弦函数都是谐和函数,凡按正弦或余弦规律变化的运动,都叫做谐和运动。而作为一种典型的运动形式或一种有特定意义的运动模型的“简谐运动”,以它的特殊性质区别于一般的谐和运动,这就是:它的运动周期由振动系统的固有性质决定,它的振幅A和初相ϕ则由振动的初始条件决定。如果不考虑上述特征,只从上式中的表达式是不可能把简谐运动从一般的谐和运动中区别出来的。
②简谐运动的第(2)、(3)种定义,在力学范围内是完全等价的,它们确切地定义了“简谐运动”这种独特的运动,由F=-kx和牛顿定律可以得到\(\frac{{{d^2}x}}{{d{t^2}}} + {\omega ^2}x = 0\),由积分\(\frac{{{d^2}x}}{{d{t^2}}} + {\omega ^2}x = 0\)也可以得到x=Acos(ωt+ϕ),而且其中的ω、A、ϕ正好具有简谐运动才有的特性。
当把“简谐运动”这个运动模型推广到力学以外的领域时,\(\frac{{{d^2}x}}{{d{t^2}}} + {\omega ^2}x = 0\)的优点就显现出来了。任何一个物理量z,只要满足这个微分方程,那么这个量就随时间在某一值附近做简谐运动。例如,电磁学中由电感和电容构成的LC电路中发生电磁振荡时,电流i满足的微分方程为\(\frac{{{d^2}i}}{{d{t^2}}} + \frac{i}{{LC}} = 0\),电流i随时间作余弦变化,i=i0cos(ωt+ϕ)。其中\(\omega = \sqrt {\frac{1}{{LC}}} \),由LC电路的固有电学性质决定;振幅i0和初相ϕ,由引起振荡的初始条件决定。由上面的式子可知,LC电路中的电流做简谐运动,而电流的简谐运动就不好用线性回复力F=-kx来定义了。
可见,简谐运动的第(3)种定义十分确切,便于推广。但是中学生不熟悉微积分,这种定义显得十分抽象。在中学物理教学中,为了便于学生接受,采用F=-kx的定义是可以的。教学中,为了避免混淆,在适当的时候,应介绍简谐运动的三个特征量A、ω、ϕ的确定方式,以便使x=Acos(ωt+ϕ)对简谐运动的定义更加完整。
2.关于单摆的周期
(1)非线性摆的振动周期
一根不可伸长、不计质量的绳长为l,一端固定于O点,另一端系一质量为m的小球,就可组成一个摆,竖直线OP为摆以O点为轴摆动的平衡位置。
为了研究摆动的一般规律,把摆看作是个绕O点转动的刚体,摆对O轴的转动惯量I=ml2。当角位移为θ时,作用于小球的重力对O点的力矩M=-mglsinθ(其中的负号表示力矩的方向与角位移θ的方向相反),根据定轴转动的定律
Iβ=M,
有\(m{l^2}\frac{{{d^2}\theta }}{{d{t^2}}} = - mgl\sin \theta \),
整理后可得\(\frac{{{d^2}\theta }}{{d{t^2}}} + \frac{g}{l}\sin \theta = 0\)。
这是一个非线性微分方程,与简谐运动的微分方程\(\frac{{{d^2}x}}{{d{t^2}}} + {\omega ^2}x = 0\)不同,因此,一般情况下的摆,角位移随时间的变化规律不是余弦式,所作的摆动,不是简谐运动,而是一种非线性振动。这种摆的周期表达式为
\(T' = T\left[ {1 + \frac{1}{4}{{\sin }^2}\left( {\frac{{{\theta _0}}}{2}} \right) + \frac{9}{{64}}{{\sin }^4}\left( {\frac{{{\theta _0}}}{2}} \right) + \cdots } \right]\)
其中\(T = \frac{{2\pi }}{\omega } = 2\pi \sqrt {\frac{l}{g}} \)。
可见,一般情况下的摆的周期随摆幅(由θ0表示)的变化而变化,不是等时摆。
(2)单摆和它的周期
当摆动过程中,摆线对平衡位置的角位移θ的绝对值都很小,以致sinθ≈θ时,\(\frac{{{d^2}\theta }}{{d{t^2}}} + \frac{g}{l}\sin \theta = 0\)可以近似为\(\frac{{{d^2}\theta }}{{d{t^2}}} + {\omega ^2}\theta = 0\),其解为
θ=θ0cos(ωt+α),
其中θ0为最大摆角,为角振幅,周期\(T=2\pi \sqrt {\frac{l}{g}} \) 。
通常所说的单摆是指一般的非线性摆在摆角振幅很小时的情形。这是一种等时摆,周期与振幅的大小无关,是一种理想模型。
在实际应用中,在摆角足够小的条件下,就可以使用单摆的周期公式进行计算。
(3)怎样认识“摆角足够小”的条件
由摆的周期Tʹ的公式以及单摆的周期T的公式的比较中可知,如略去正弦函数4次及更高次项,则误差 \(\eta = \frac{{T' - T}}{T} = \frac{1}{4}{\sin ^2}\left( {\frac{{{\theta _0}}}{2}} \right)\), θ0为最大摆角。为了有一个定量概念,在θ0为不同角度时周期的误差如下表所示。
| θ0 | 60° | 30° | 15° | 10° | 5° |
|---|---|---|---|---|---|
| η | 0.0625 | 0.0167 | 0.0426 | 1.9×10-3 | 4.76×10-4 |
从以上数字可以看到:当最大摆角在15°以内时,误差在5%以内;当最大摆角在5°以内时,误差在0.05%以内。
实验中还会有测量误差,如摆长测量误差,计时误差,等等。由于中学物理实验对精度要求不很高,同时,系统误差的精度与测量误差的精度应该协调,因此可以认为θ<15°时,可以满足中学物理实验对误差的要求,做演示实验时,为了增加可见度,单摆的摆角不必过于拘泥于小于5°这个条件。
3.昆虫的嗡嗡声
为什么昆虫在飞的时候时常会发出嗡嗡声来呢?它们大多数是没有发出这个声音的特殊器官的。这个嗡嗡声是只有在昆虫飞行的时候才听得到,原因是昆虫飞行的时候,每秒钟都要振动它的小翅膀几百次。
振动着的翅膀事实上就是振动着的膜片,而我们知道,所有振动得足够频繁的膜片(每秒钟振动数超过20次的),都会产生出一定高低的音调来。现在你可以明白,人们是用什么方法知道各种昆虫飞行时候翅膀振动的次数的,这件事情很简单,只要从听觉上判定昆虫发出嗡嗡声的音调高低就行了。因为每一种音调都是跟一定的振动频率相当的。通过高速摄影技术人们确定了各种昆虫的翅膀振动次数是几乎不变的;昆虫要调节它们的飞行,只是改变翅膀振动的大小即“振幅”和翅膀的倾斜度;只在受到天冷的影响的时候才增加每秒钟振动翅膀的次数,正是因为这个缘故,昆虫在飞行的时候发出的音调总是不变的……
苍蝇(飞的时候发出F调音)每秒钟振动翅膀352次。山蜂每秒钟振动翅膀220次。蜜蜂在空着身子飞的时候发出A调音,每秒钟振动翅膀440次,如果带着蜜飞行,翅膀每秒钟只振动330次(B调)。甲虫飞行的时候发出的音调比较低,两翅振动得比较慢,而蚊子每秒钟要振动翅膀500~600次。为了使大家对上面这些数目有进一步的了解,还可以比较一个数目:飞机的螺旋桨平均每秒钟转25转。
4.利用声波干涉控制噪声的原理
内燃机、通风机、鼓风机、压缩机、燃气轮机在排放各种高速气流的过程中,都伴随有噪声。利用干涉原理制成的干涉型消声器可以降低这种噪声。
我们知道,由两相干声源S1和S2发出的两列相干波,经r1和r2后在介质中相遇时,合振幅A为
\(A = \sqrt {A_1^2 + A_2^2 + 2{A_1}{A_2}\cos \Delta \varphi } \) ,
其中Δφ=φ2-φ1+\(\frac{{2\pi }}{\lambda }\)(r2-r1)。
若φ1=φ2,则Δφ=(2k+1)π(k=0,1,2…),即Δr=r2-r1=(2k+1)λ/2 时,A=|A1-A2|。若A1=A2,则A=0。显然,当Δr=λ/2 ,3λ/2 ,5λ/2 ……时,两列声波因相干而抵消。
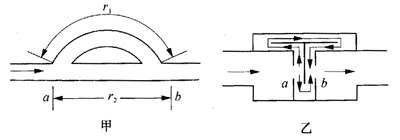
下图甲是干涉型消声器的工作原理图。有一列波长为λ的波沿水平管道自左向右传播,当入射波到达a处时,分成两束相干波,它们分别通过r1和r2,再在b处相遇,若Δr=r2-r1恰好等于声波半波长λ/2 的奇数倍,即Δr=(2k+1)λ/2时,声波的振幅A=0。这就是说该频率的声能便被削弱,从而达到控制噪声的目的,实用中的干涉型消声器的结构如图乙所示。
应当指出,干涉型消声器所控制的噪声频率是有限制的,它只能消除低频噪声,发动机的周期性排气噪声(正常工作期间),就是一种典型的低频噪声。一般说来,一台四缸四冲程发动机,当它以每分钟2000转的转速运转时,其峰值频率在200Hz以下的噪声较大。所以常用干涉型消声器来消除这类低速转动发动机所产生的低频噪声,一台带有干涉消声器的柴油发动机经消声处理后,其排气噪声可以降低10dB以上。
为了使这类消声器在低频范围内具有较宽的消声频率,往往将不同结构的消声单元串接起来,并使每一单元的Δr不等,就可以对不同波长的噪声加以控制。
(引自人民教肓出版社《物理选修3-4。教师教学用书》,2006版)
文件下载(已下载 173 次)发布时间:2014/1/8 8:43:55 阅读次数:3377