地面上测量物体质量的装置设计(一)
高二(1)班 许忆枫 王竑冰 郦煜 薛凯文 王忠 朱华江 林平
1.实验原理
物体做圆周运动时受到向心力的大小应满足F向=\(m\frac{{{v^2}}}{r}\),若我们能测出物体m做圆周运动时受到的向心力F向、线速度v及运动半径r,则可以通过下列公式求出待测物体的质量m:
\(m = \frac{{{F_向}r}}{{{v^2}}}\) (1)
为了让实验操作更加简单,我们可以使用一根细绳系住待测物体,使之在竖直平面做圆周运动,在这种情况中,公式(1)可以写成:
\(m = \frac{{(T - mg)l}}{{{v^2}}}\) (2)
经过整理可以得出m的表达式:
\(m = \frac{T}{{g + \frac{{{v^2}}}{l}}}\) (3)
公式(3)中的T为待测物体在最低点时细绳的拉力大小,它可以通过力传感器测出;g为当地重力加速度,v为待测物体通过最低点时的速度大小,它可以通过光电传感器测出;l为细绳长度,由刻度尺量出。
2.装置示意图
如图1所示:
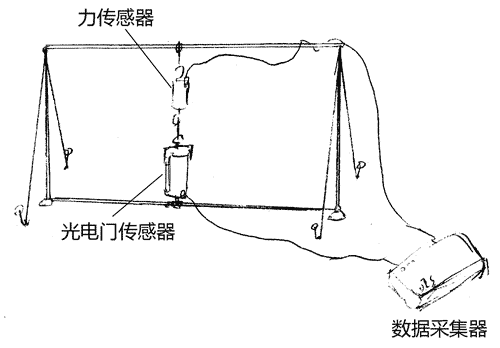
3.实验器材
细绳、门字形支架、力传感器、光电门传感器、数据采集器、计算机、挡光片。
4.操作步骤
(1)将挡光片(宽度约2mm左右)连接在待测物体下方,将待测物体连接在细绳上。挡光片的放置方式如图2所示:

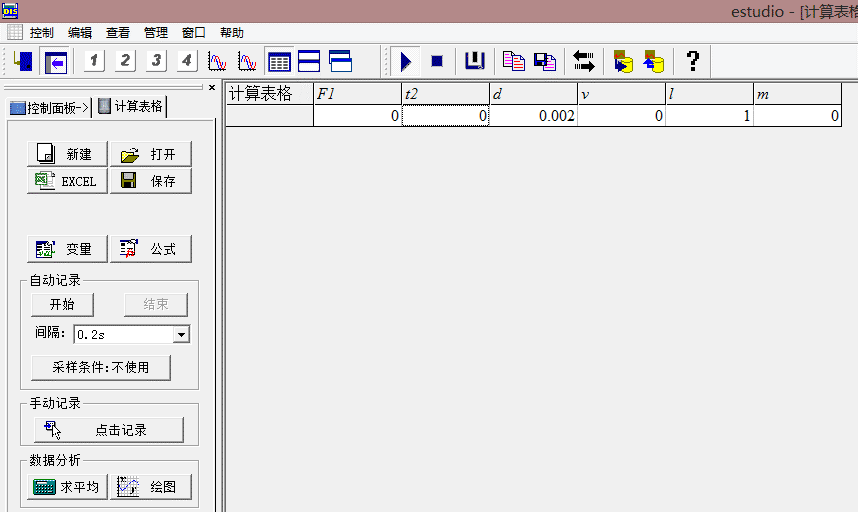
(2)将力传感器和光电门传感器分别接入数据采集器的端口1、2,对应的变量分别为F1、t2,然后添加挡光片宽度d,初始值设置为0.002m;添加速度变量v,设置公式为v=d/t2;设置绳长变量l,由刻度尺量出,这里设置为1m,最后设置变量m,设置公式为m=F1/(9.8+v^2/l)。数据表格窗口如下图3所示:
(3)打开数据采集器,进行调零,测试力传感器以及光电门是否正常工作。
(4)将待测物体拉开一定角度后由静止释放,使挡光片可以遮挡住光电门的探测孔,如若不能,则需调节光电门的上下位置;
(5)调整正常后,将待测物体拉开一定角度后由静止释放,在数据表格中的m列中就会显示出待测物体的质量。
高二(1)班 李紫莹 王诚琪 潘宸 张怡耘
1.实验原理
若在一个光滑的水平桌面上,放一个质量为m的物体,用一个水平弹簧与其相连,弹簧的另一端固定。物体可静止于使弹簧保持其自然长度的位置,称为平衡位置。当弹簧被拉离平衡位置之后,形变将使其产生一个水平弹性回复力,其方向指向平衡位置。这里重力与桌面的支撑力相抵消,不影响其水平运动。在弹性回复力的作用下,物体会围绕平衡位置振动,其振动周期为\(T = 2\pi \sqrt {\frac{m}{k}} \),这里的k为弹簧的劲度系数。若测量出弹簧劲度系数及振动频率,则可以从上式中解出质量m的值。
可以证明,当将弹簧竖直挂上一个质量为m的物体时,弹簧将被拉长,并可静止于一个平衡位置。当弹费被拉离这个平衡位置并释放时,它将围绕平衡位置上下振动,其振动周期与水平振子的公式相同。在微重力条件下,振子振动周期的计算公式仍然不变。因此,我们可以从振动周期和劲度系数计算得到物体的质量。
为了让测量更加简单并减小误差,我们采用了双弹簧振子的装置,并在此原理的基础上又做了一些改进:
首先测出一个已知质量M物体做N次全振动的时间t1,此时应满足:
\(\frac{{{t_1}}}{N} = 2\pi \sqrt {\frac{M}{k}} \)(1)
然后将待测物体m与已知质量M的物体合并在一起,仍测出它们做N次全振动的时间t2,此时应满足:
\(\frac{{{t_2}}}{N} = 2\pi \sqrt {\frac{{M + m}}{k}} \)(2)
联立(1)(2)两式得:
\(\frac{{t_1^2}}{{t_2^2}} = \frac{M}{{M + m}}\) (3)
即:\(m = \frac{{t_2^2 - t_1^2}}{{t_1^2}}M\) (4)
由公式(4)可知,我们只需测出t1、t2,代入上述数据即可求出待测物体的质量m。而且,当实验装置确定之后,t1只需测一次,以后都可以作为已知量处理,因此在测量时只需测定一个物理量t2即可。
2.装置示意图
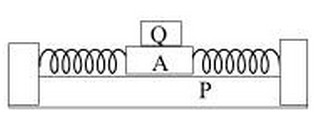
3.实验器材
光滑导轨、两根的弹簧(k并不需要测出,k不同亦可),质量M已知的物块A、秒表。
4.操作步骤
(1)不放待测物体Q,使A偏离平衡位置做简谐振动,用秒表测出弹簧振子振动N所需的时间t1。
(2)将待测物体Q固定在物块A上,仍使A偏离平衡位置做简谐振动,用秒表测出弹簧振子振动N所需的时间t2。
(3)将测得的物理量代入公式\(m = \frac{{t_2^2 - t_1^2}}{{t_1^2}}M\) ,即可求出待测物体的质量m。
说明:比起王亚平老师介绍的弹簧振子,使用这种装置无需知道弹簧的劲度系数。而且这种装置可以在太空中正常使用,我们可以在地面上测出物体Q的质量M、周期T1=t1/N ,上述两个物理量在太空中不会发生变化,为了舒适起见、可以将Q做成椅子。在太空中时,质量未知的航天员坐在椅子上,使之做简谐振动,可以使用光电门传感器代替秒表测量振动周期T2,这样使用如下公式:
\(m = \frac{{T_2^2 - T_1^2}}{{T_1^2}}M\)
就可以非常快地测量出航天员的质量,此装置结构简单,具有很高的实用价值。
高二(3)班 赵余晨 韩梦珺 吴闻硕 邱逸平
1.实验原理
我们从DIS通用实验——“向心力的研究”中汲取了灵感,此实验的目的是研究向心力与质量、半径和角速度的关系,但在步骤中稍作调整,就可以成为一个测量物体质量的装置。
做圆周运动的物体所受向心力应满足F向=mω2r,此公式可变形为:
\(m = \frac{{{F_向}}}{{{\omega ^2}r}}\) (1)
也就是说,只需测出向心力、角速度、圆半径,即可代入公式(1)求出待测物体的质量。为了提高结果的准确度且便于处理,我们可以多次测量F向和ω,然后在F向-ω2图像中进行描点,并进行直线拟合,求出此直线的斜率k。最后待测物体的质量m可以下列公式求得:
\(m = \frac{k}{r}\) (2)
2.装置示意图
如图1所示:
3.实验器材
DIS向心力实验器及配件。
4.操作步骤
(1)将光电门传感器和力传感器分别接入数据采集器;
(2)按实验装置图把两个传感器固定在向心力实验器上,实验器有关参数:挡光杆直径0.005m、挡光杆到轴心的距离0.14m;
(3)将实验器调节为水平,对力传感器调零,把待测砝码固定在离轴心0.12m处;
(4)打开“计算表格”窗口,点击“开始”,转动实验器的悬臂,记录F、t数据;
(5)点击“公式”,输入计算线速度和角速度的公式:v=0.005/t1、ω=v/0.14、q=w^2,得到计算结果;如下图2所示:
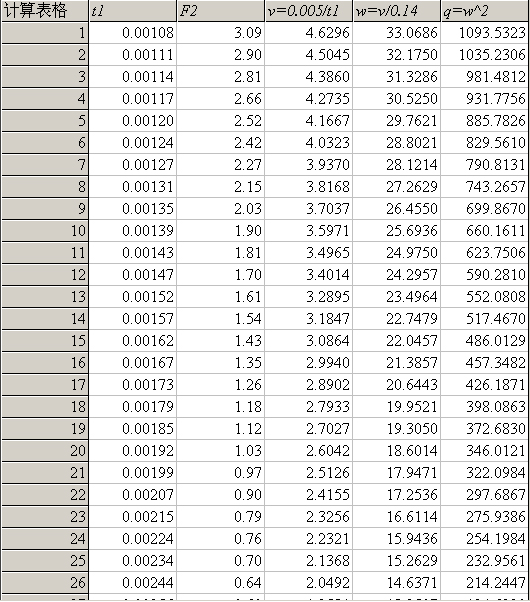
(6)点击“绘图”,选取X轴为“q”,Y轴为“F2”,得到数据点在坐标系内的分布图,点击“线性拟合”,拟合图线为过原点的直线。如下图3所示:
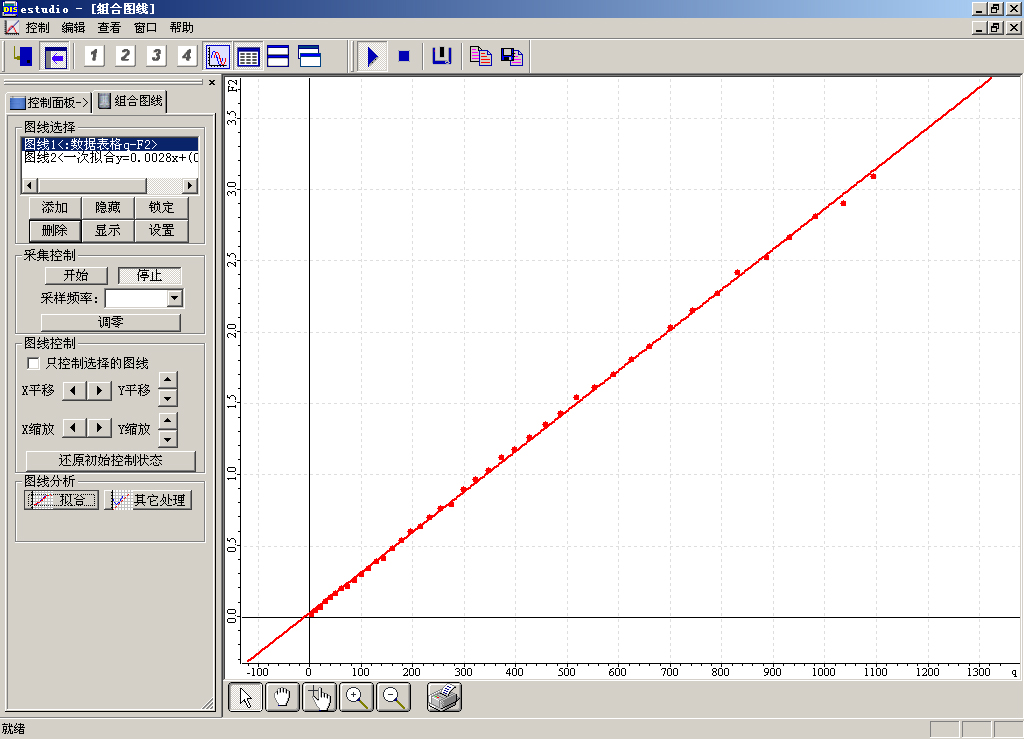
(7)在左侧的图线选择框中可以看到拟合方程:
y=0.0028x
由向心力公式F=mω2r可知,F-ω2图线的斜率对应的物理量为mr,即mr=0.0028,而r=0.12m是已知的,因此待测砝码的质量为m=0.023kg。
说明:这个装置在太空中仍然可以正常使用,且携带方便、测量精度高。
高二(7)班 戴中钦 程彦煜 董振宇 吴逸飞 顾成杰 黎之豪 徐瀛
1.实验原理
万有引力定律告诉我们,任何两个有质量的物体之间存在相互吸引力,这个力叫做万有引力定律,它的大小可以由以下公式得到:
\(F = G\frac{{mm'}}{{{r^2}}}\) (1)
式中G为万有引力恒量,其大小为6.67×10-11N•m2/kg2。因此,只需测出F、r、m,就可以通过公式(1)的变形:
\(m' = \frac{{F{r^2}}}{{mG}}\) (2)
得到待测物体的质量mʹ。然而,由于万有引力恒量很小,因此F通常很小,用常规测力的方法误差偏大。我们借鉴了卡文迪许扭秤装置,用两种方法解决了测量微小力的难点:
- 将测力转变为测石英丝的扭矩;
- 利用了光尺放大技术。
当一束光照射到固定在游丝上的反射镜上时,若光线与圆镜的法线有一微小角度时,反射光则以与入射角相同的角度反射到远处的光尺上,一般光尺到圆镜的距离有几十厘米,所以反射光的光点在光尺上就划过一个较大距离,这样游丝的微小转动在光尺上就能读到一段较大的尺寸,使微小量得到了放大。由以上说明,此装置在平衡时应该满足的方程是:
\(k\theta = G\frac{{mm'}}{{{r^2}}} \cdot \frac{l}{2}\) (3)
可得:
\(m' = \frac{{2k\theta {r^2}}}{{Gml}}\)(4)
公式(4)中k为石英丝的扭转系数,r为m与mʹ间的距离,θ为支架偏转角度,m为小球的质量,l为支架水平横梁的长度。在实际应用中,k、m、l都是已知量,因此只需测量r和θ即可。
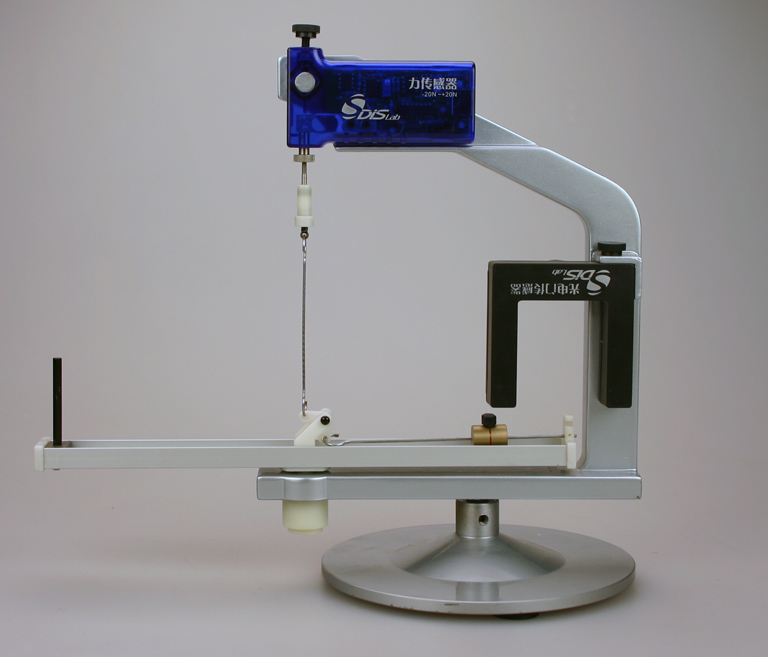
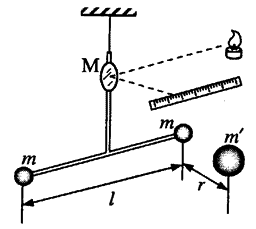
2.实验装置
图1为装置的立体图。
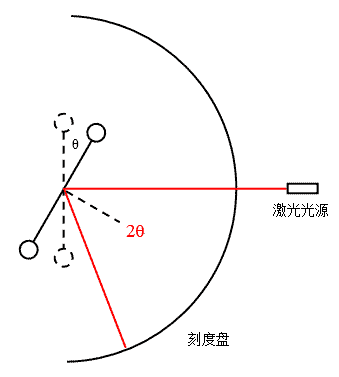
为了使测量θ的过程更简单,我们可以将直刻度尺做成圆弧状,并将表示长度的刻度替换成角度,这样无需进行转换就可以直接读出支架偏转的角度θ,如图2所示:
3.实验器材
轻质T形支架,两个质量m已知的小球,扭转系数k已知的石英丝,激光光源,刻度尺,平面反光镜。
4.实验步骤
(1)将轻质T形架倒挂在石英丝的下端,T形架水平部分的两端,各装一个质量是m的小球,T形架的竖直部分装一面小平面镜M,能把射来的光线反射到一根刻度尺上。
(2)把待测物mʹ放在m附近,由于m受到mʹ的吸引,使T形支架受到扭转力矩而转动,同时石英丝发生扭转,产生相反的扭转力矩,阻碍T形架转动,当这两个扭转力矩产生的效果相抵消时,T形架停下来不动。
(3)此时从弧形刻度尺上读出石英丝扭转的角度θ,用刻度尺量出m与mʹ的距离r。
(4)代入公式\(m' = \frac{{2k\theta {r^2}}}{{Gml}}\)求出待测物mʹ的质量。
5.说明
这个测量质量的装置在太空中仍可以使用。但由于装置无法做得太大,因此量程不大,无法测量质量太大的物体。
高二(7)班 龚思斌 张金杰明 周嘉懿 王之豪 汪世洋 周嘉辰 韩子昆 赵嘉宸
1.实验原理
动量守恒定律告诉我们,若两个质量为m1,m2的物体发生完全非弹性碰撞,应满足下列公式:
m1v1+m2v2=(m1+m2)v (1)
公式(1)中的v1、v2、v分别是物体m1的初速、m2的初速、碰撞后m1和m2的共同速度,若已知m2、v1、v2、v,就可以通过公式(1)的变形求出m1的质量:
\({m_1} = \frac{{{m_2}(v - {v_2})}}{{{v_1} - v}}\) (2)
为了减小测量误差,我们可以使v2=0,且用如下图1所示的装置测量碰撞后两者上升的高度,这样就可以通过机械能守恒定律间接地求得\(v = \sqrt {2gh} \),这样公式(2)就可以简化为:
\({m_1} = \frac{{{m_2}\sqrt {2gh} }}{{{v_1} - \sqrt {2gh} }}\) (3)
我们可以事先测量出m1,用光电门传感器测出碰撞前m1的速度,从高度计读出两者上升的高度h,得出上述数据后代入公式(3)就可以求出待测的质量m1。
2.装置示意图
如图1所示:
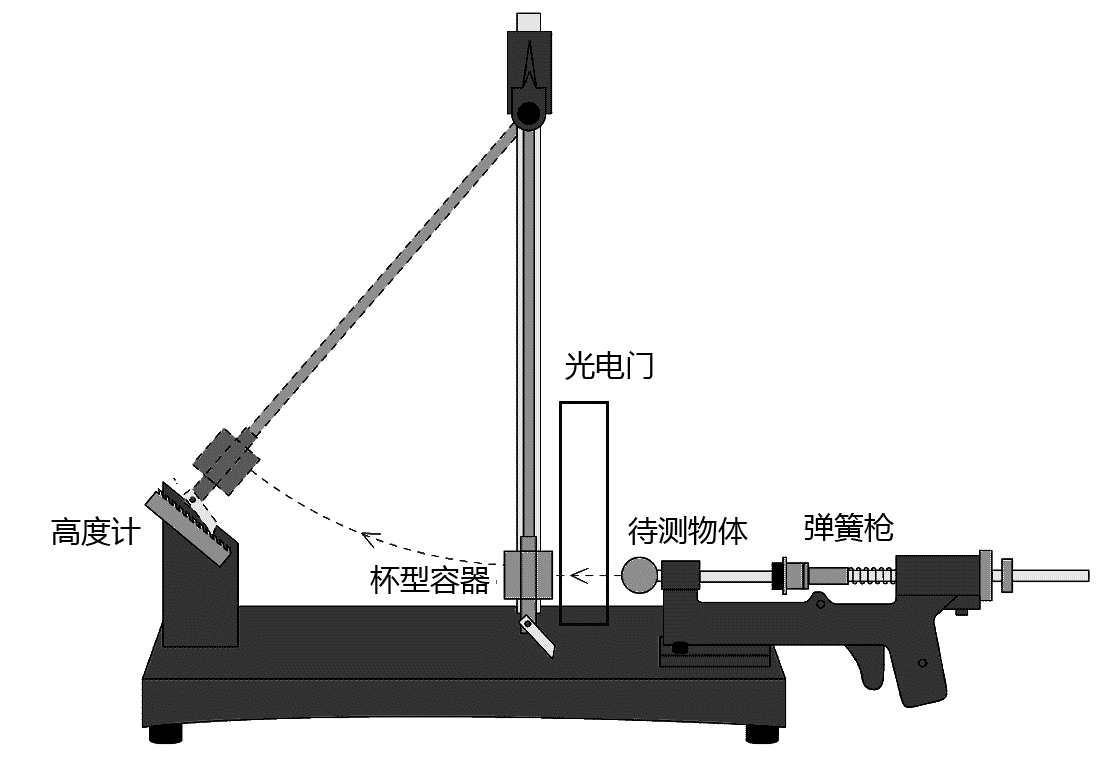
3.实验器材
铁架台、与轻直杆相连的杯形容器、弹簧枪、光电门传感器、高度计。
4.操作步骤
(1)测出待测物体的挡光宽度,光电门传感器需要这个值进一步测出碰撞前瞬间的瞬时速度;
(2)将待测物体放置于弹簧枪发射端后,使用弹簧枪将它射出;
(3)从高度计刻度上读出两者上摆的高度;
(4)代入公式(3)求出待测物体的质量。
文件下载(已下载 646 次)发布时间:2014/1/2 21:44:40 阅读次数:7207