拾球小车
简介
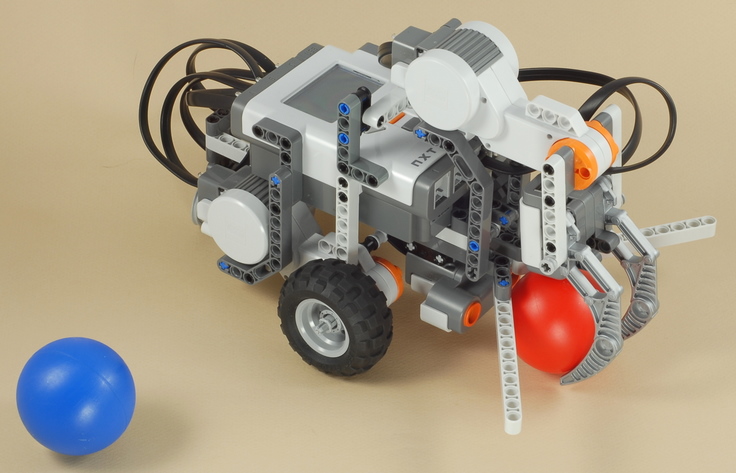
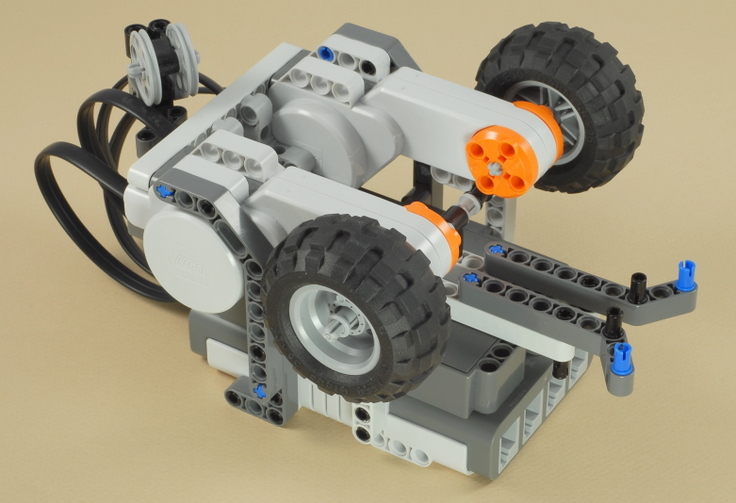
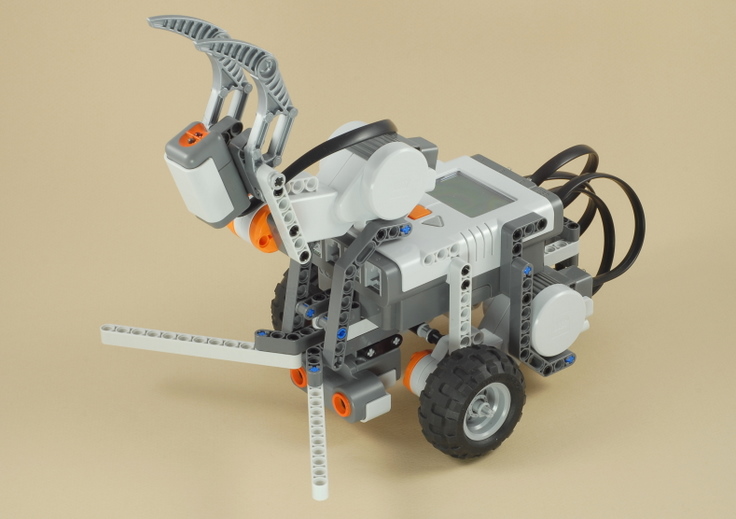
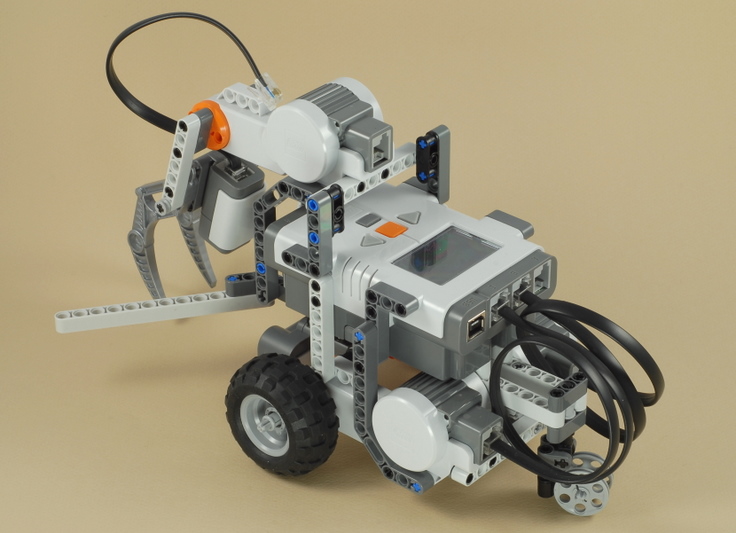
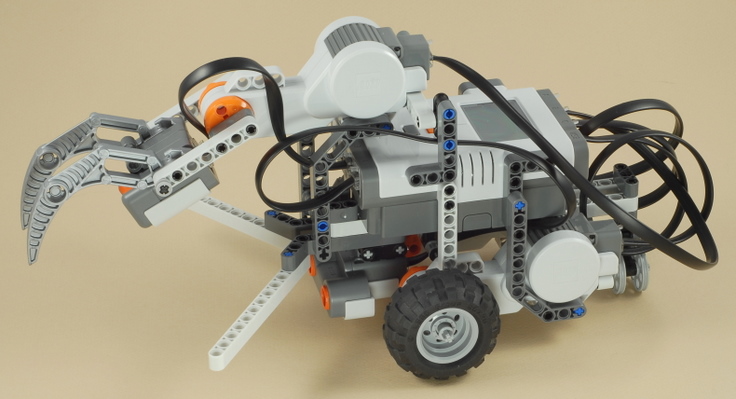
这个机器人的任务是找到红球并抓住它。你可以在小车出发地点的附件放置一红一蓝两个小球,这个机器人就会试着找到红球并抓起它。拾球小车使用了超声波传感器定位最近的小球,然后使用光传感器分辨出红球。如果首先找的是蓝球,小车会推开它,之后继续找红球。
搭建难度:
 ;编程难度 :
;编程难度 : 。
。
搭建
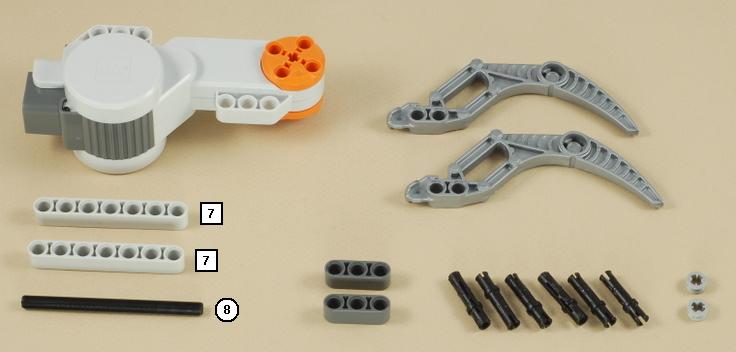
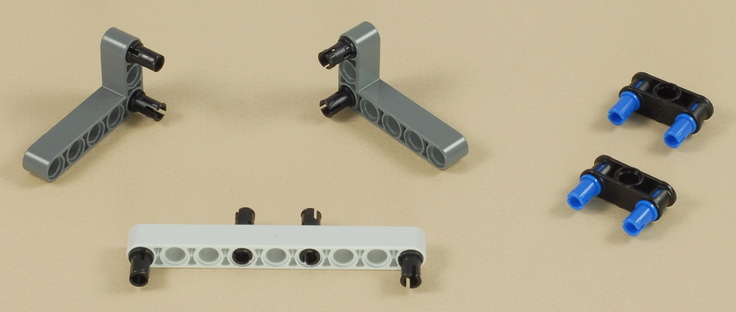
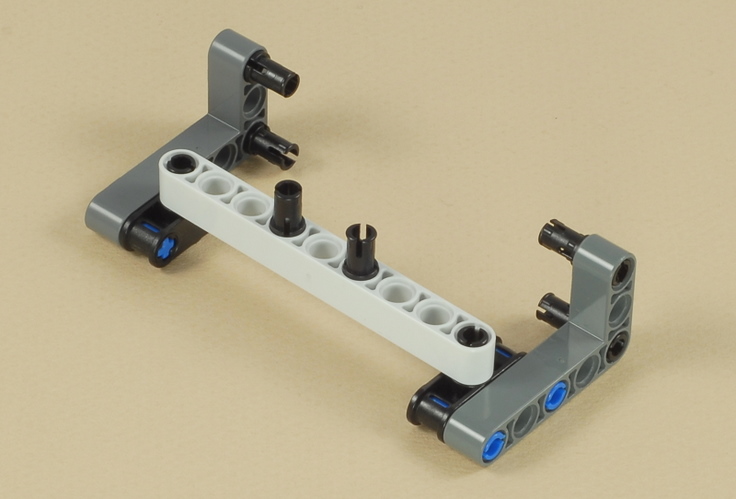
1-11
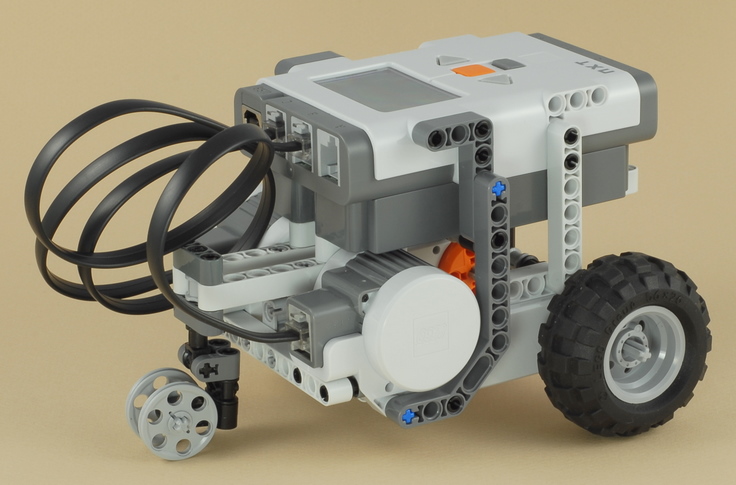
首先需要搭建基础小车。
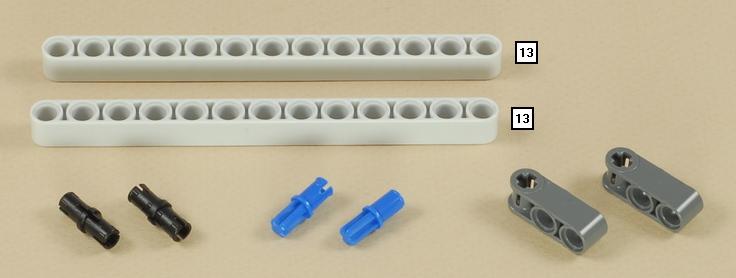
12
13
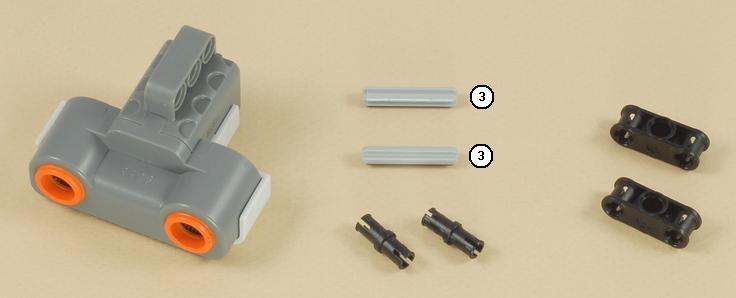

14

15
16


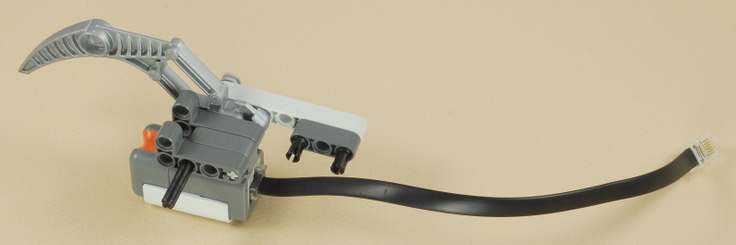
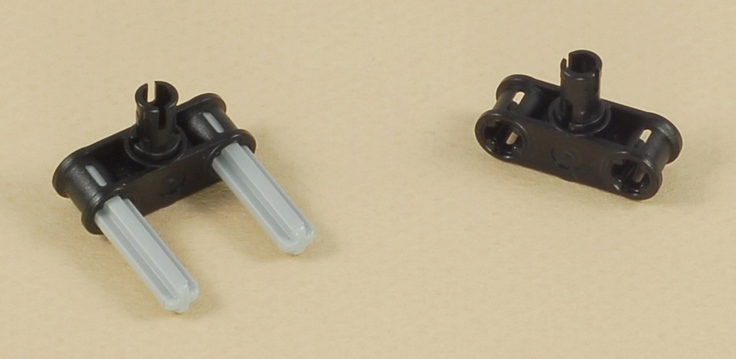
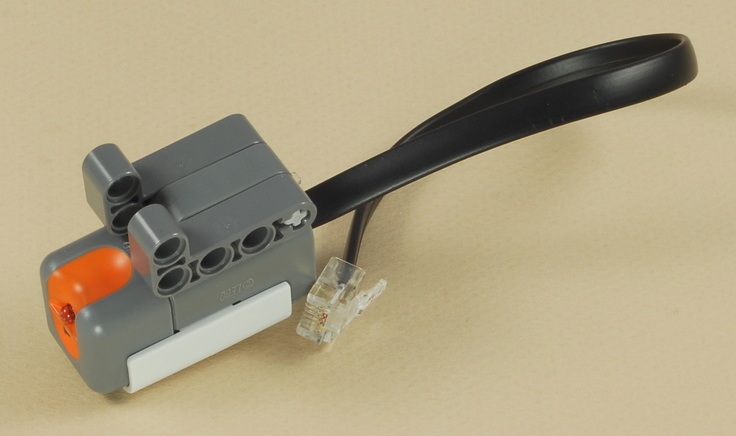
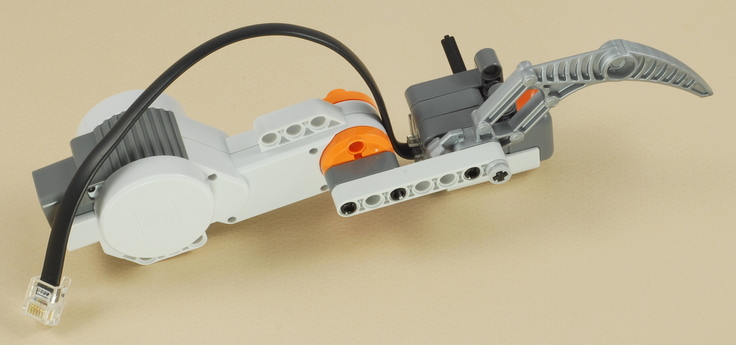
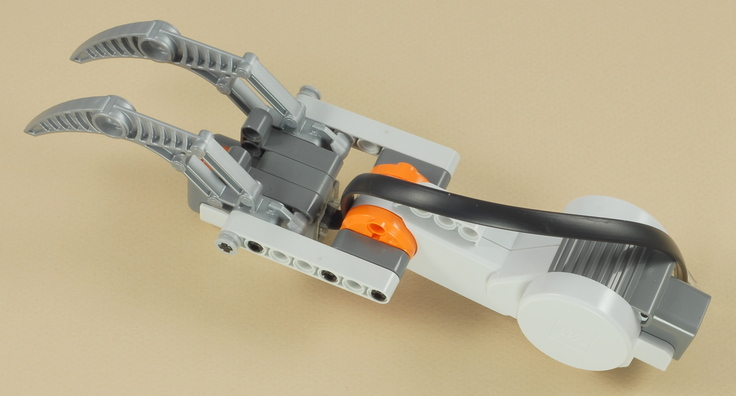
如下图所示,连接线必须从马达上方穿出。
17

18

19
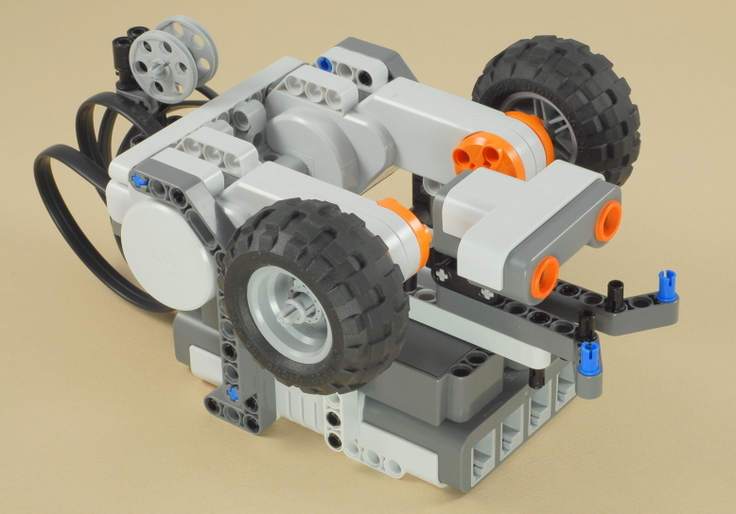
如下图所示连接剩下的线缆,注意不要缠绕或阻挡小车的运动:
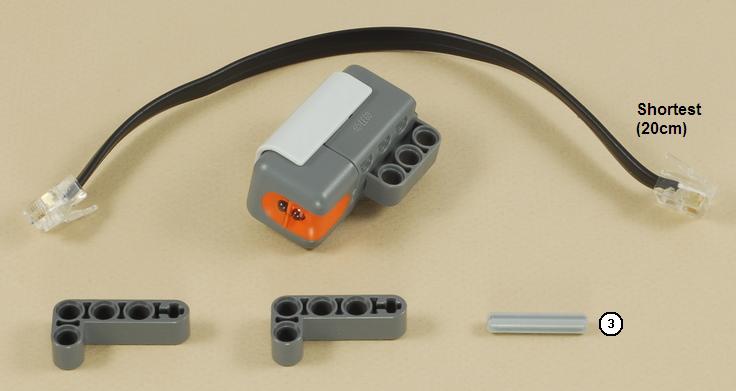
- 光线传感器:短线缆(20cm),端口3
- 超声波传感器:中线缆(35cm),端口4
- 抓取马达:中线缆(35cm),端口A
编程
这个程序控制小车进行如下动作:
- 原地回转,使用超声波传感器找到最近的小球。
- 向最近的球运动并抓住它。
- 使用光线传感器判断是红球还是蓝球。
- 如果是蓝球,则将它推开,回到出发位置,继续步骤1
- 如果找到的是红球,则停止。
使用
拾球小车在硬地板上运动得最精确,但是球就会在地板上乱滚,所以最好在薄地毯上进行实验,在厚地毯上小车会走得不精确。你也可以把球放在小橡皮筋上使它不乱滚,这样在硬地板上也可以进行测试了。
- 首先将拾球小车放在在场地中央,如果它看到看到墙或其他物体,就会不知所措并试图去抓它们。
- 在小车附近只放置红球,或两个红球,或两个蓝球,距离小车最好不要超过60cm,越近小车工作得越好。
- 最难也是最有趣的情况是使用两个球,蓝球距小车更近。在这种情况下,小车会首先向蓝球运动,然后弹开它,接着去找红球。

原文地址:http://www.nxtprograms.com/ball_hunter/steps.html。
发布时间:2013/11/12 8:46:56 阅读次数:8827