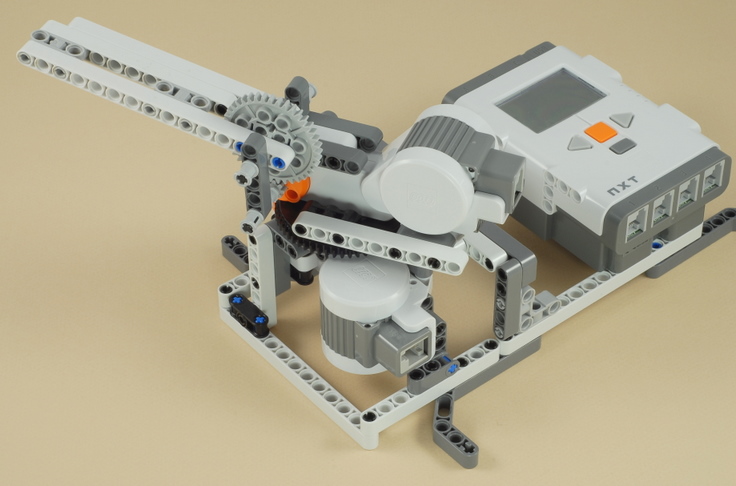
机械手臂
简介
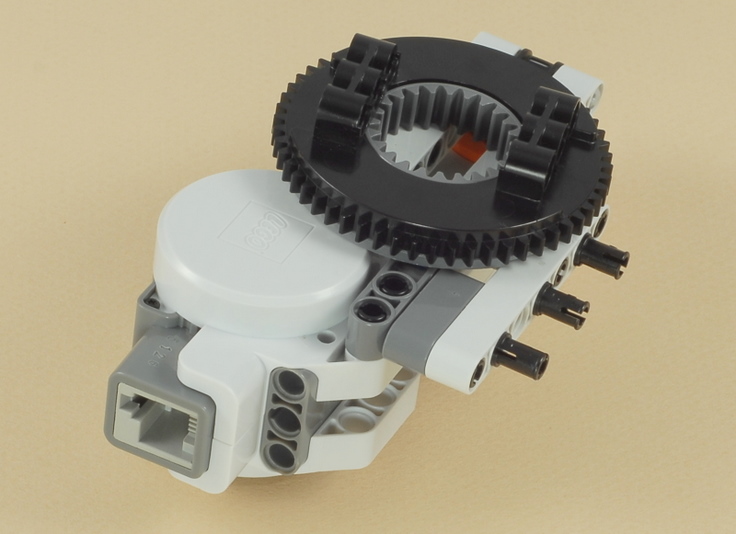
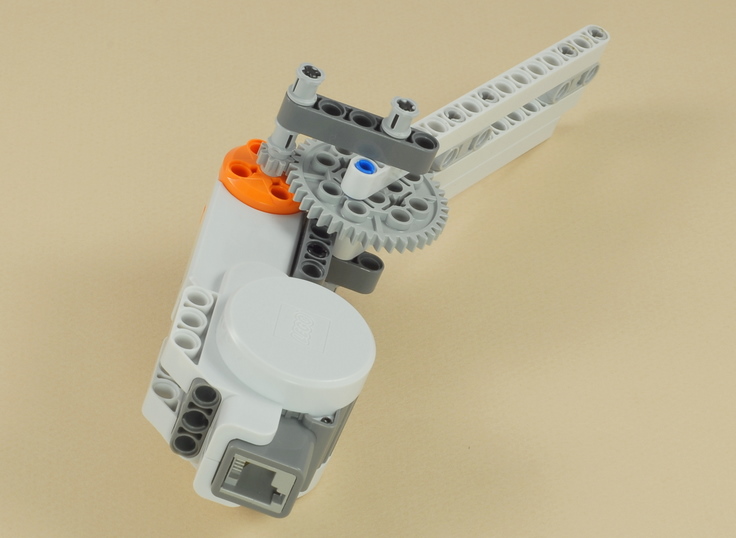
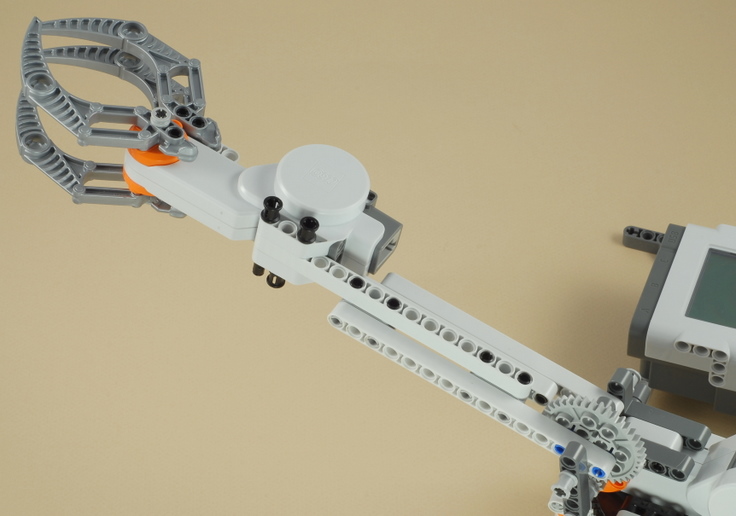
这个机械手臂使用了三个马达,其中一个马达负责转动手臂的角度(带动转动平台),一个马达负责抬起手臂的高度,或者称为手臂夹东西的角度,最后一个马达负责夹起和放下球体。一个接触传感器用来控制抓手开合,NXT上的左右键可控制手臂上下左右活动,由上下转为左右时用橙色选择键来转换。
搭建难度: ;编程难度:
;编程难度:
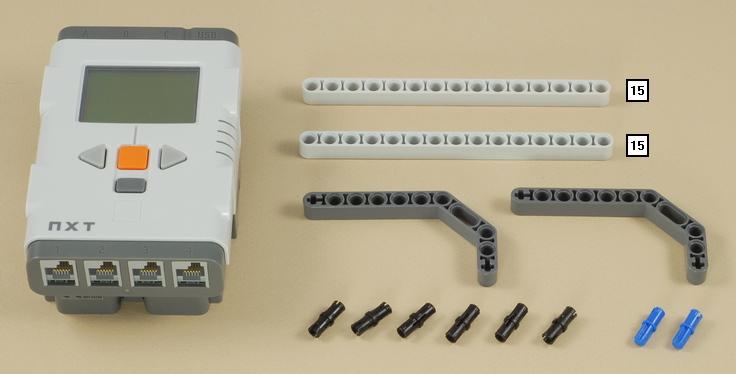
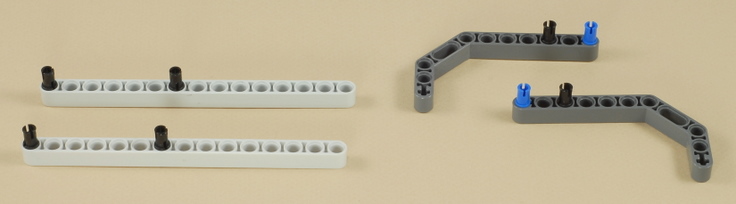
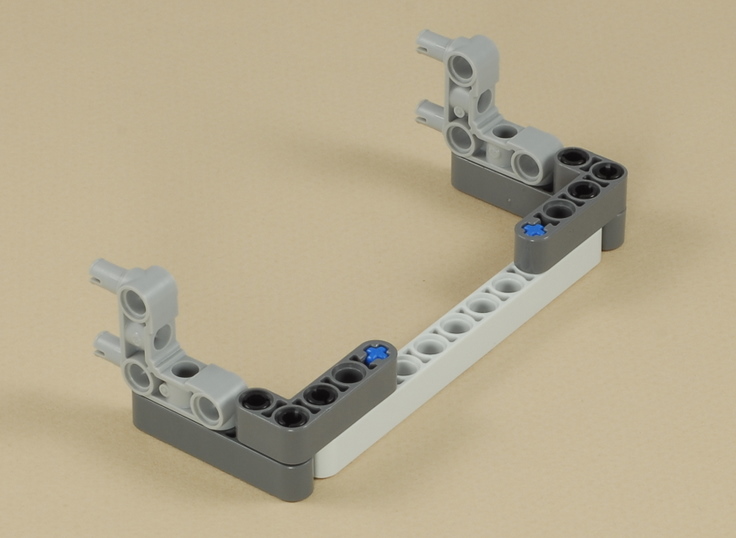
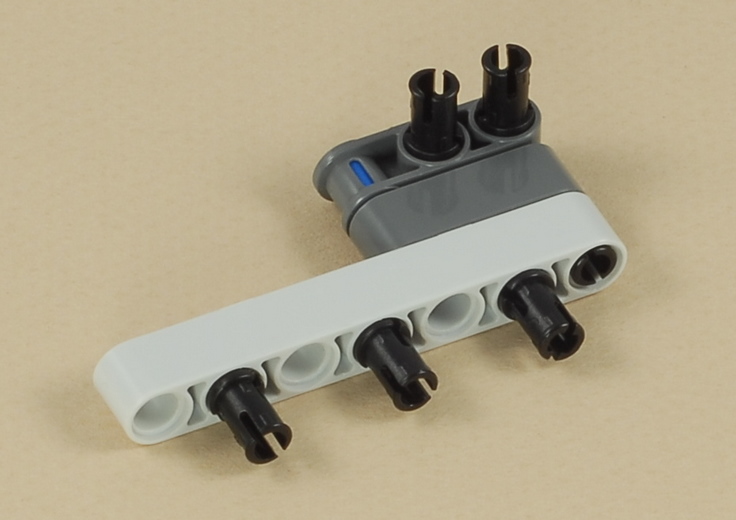
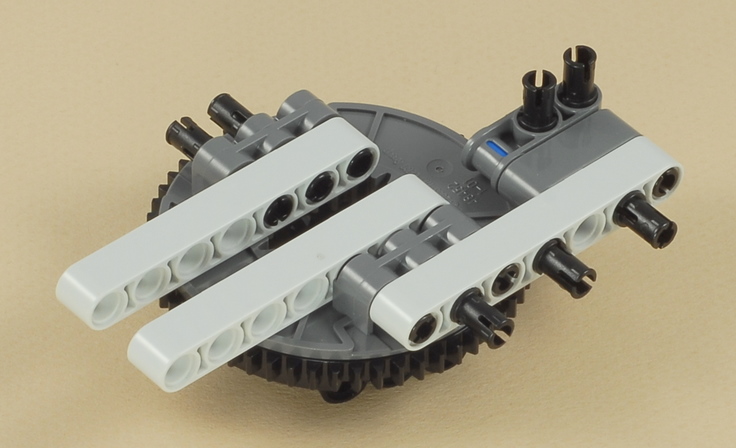
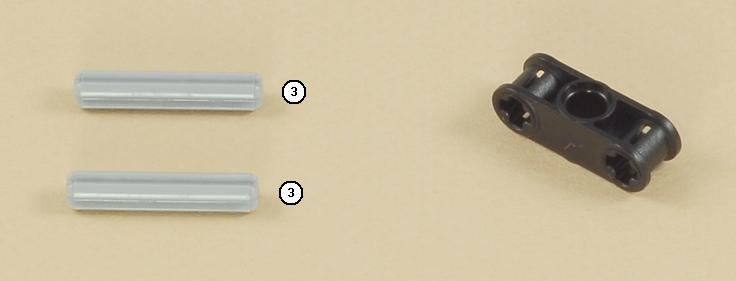
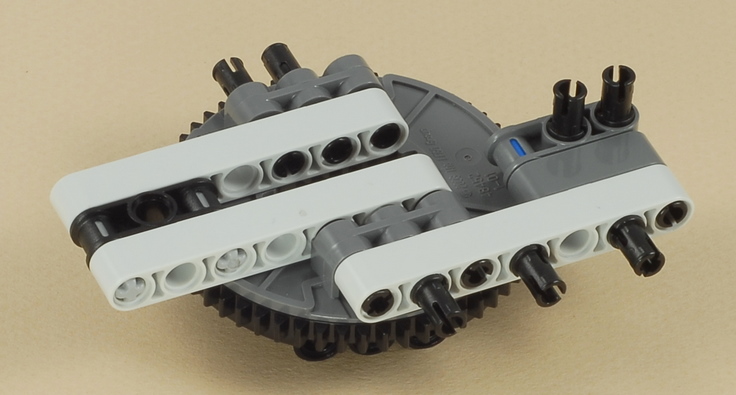
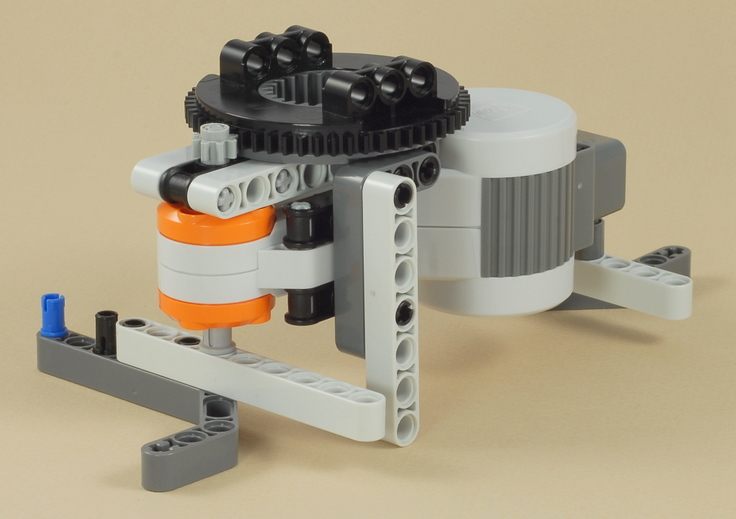
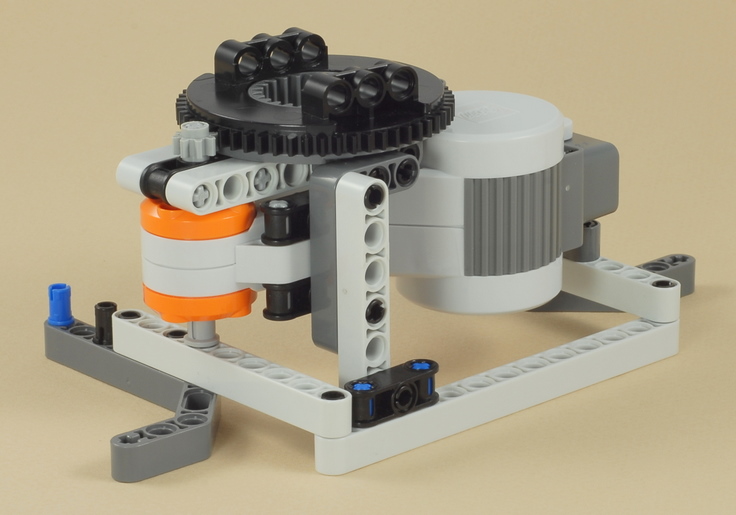
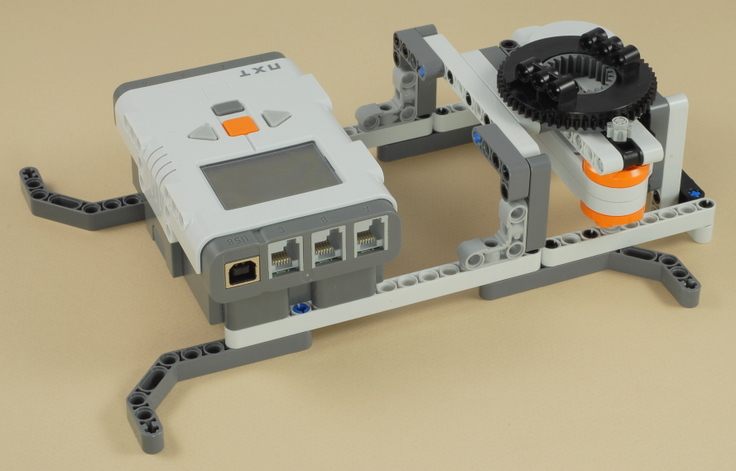
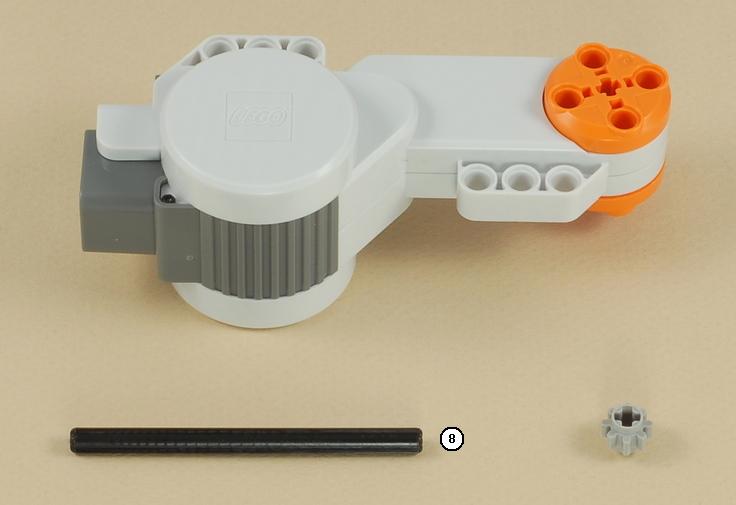
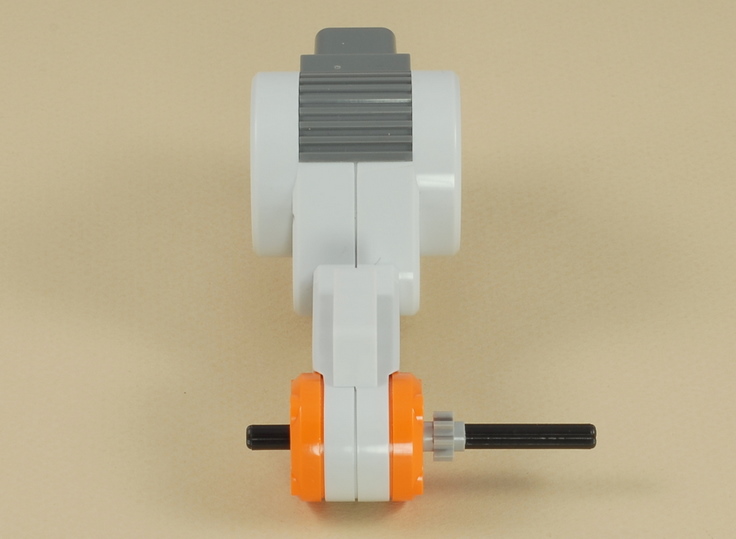
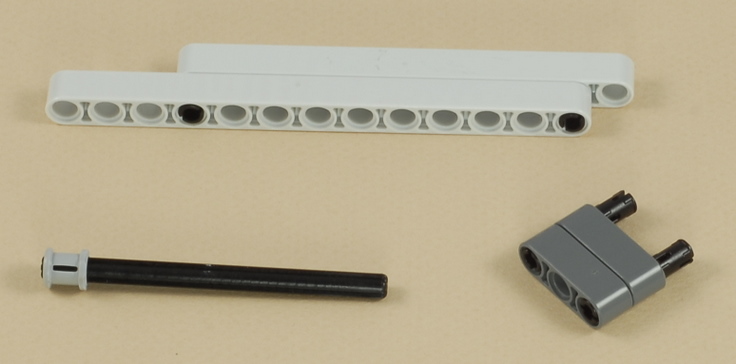
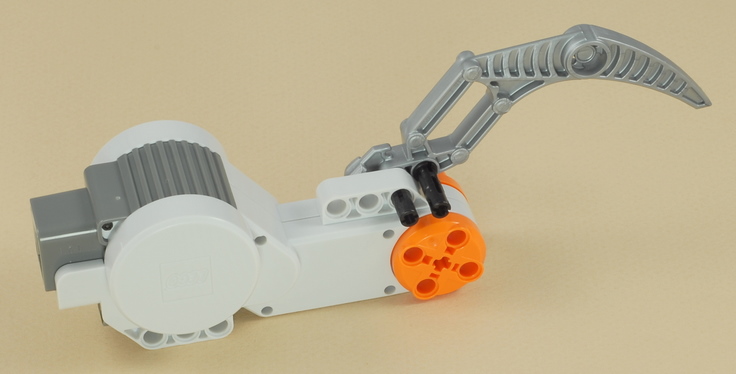
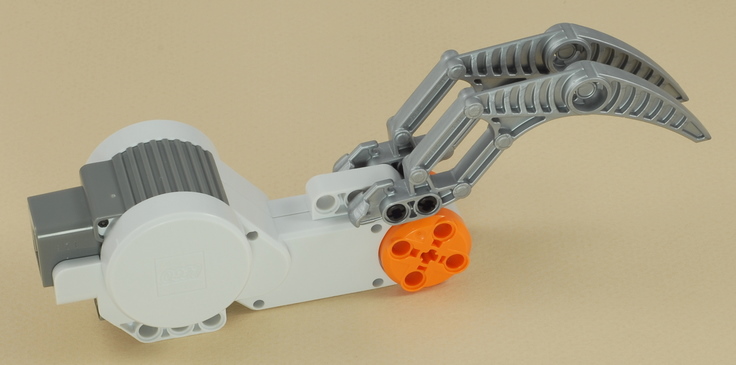
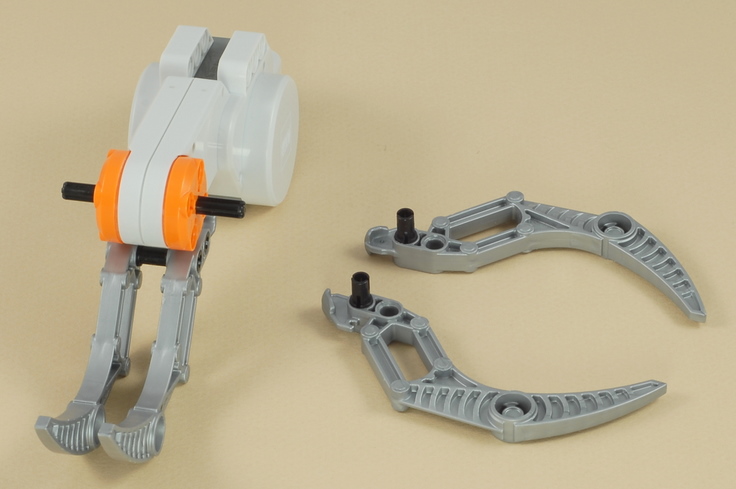
搭建
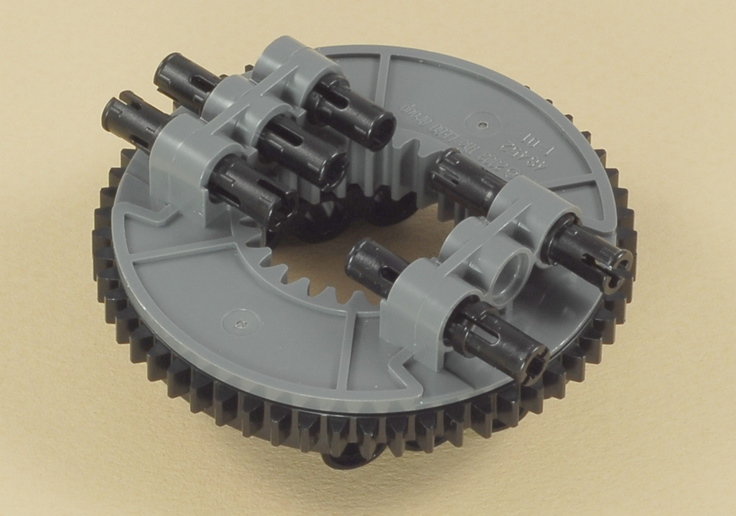
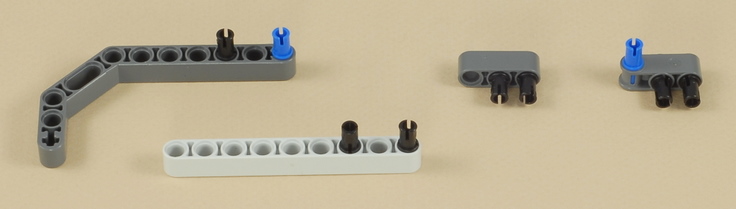
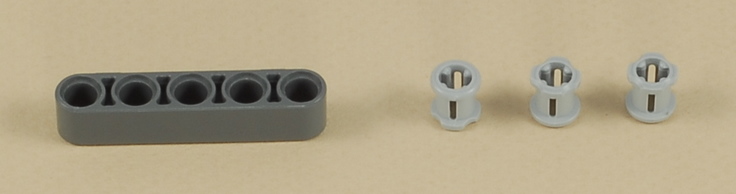
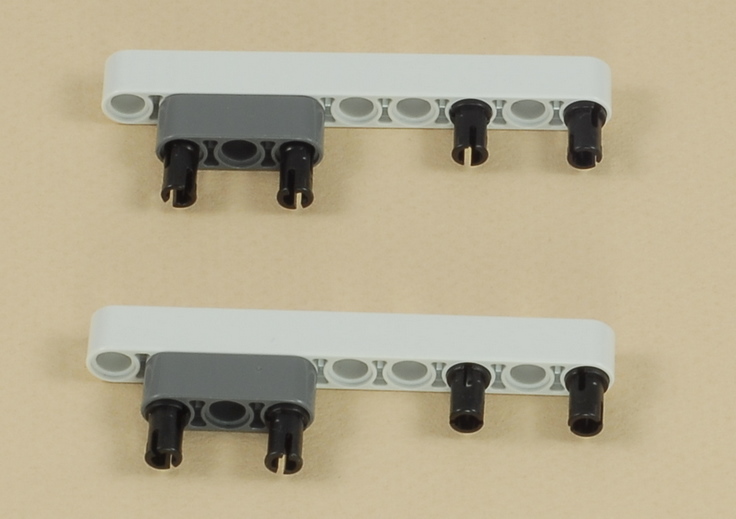
1
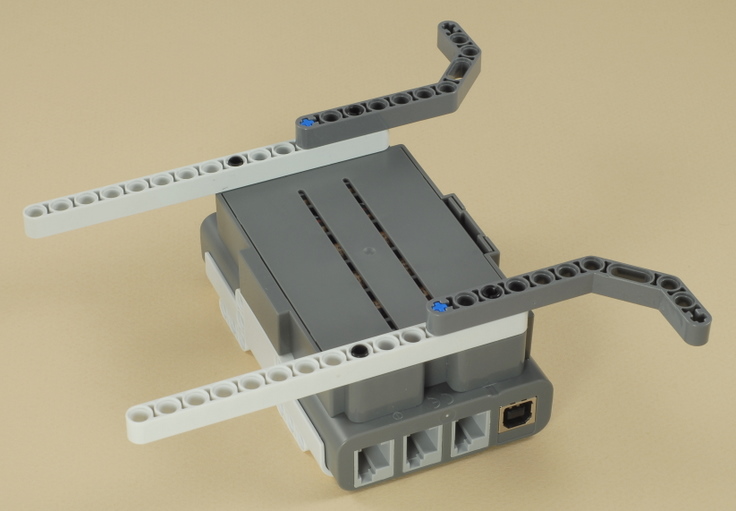
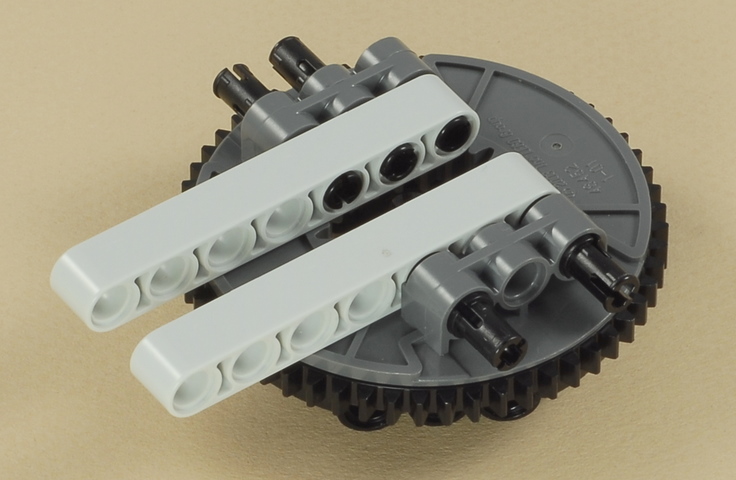
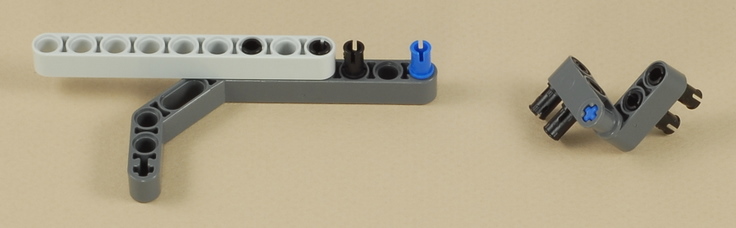
2
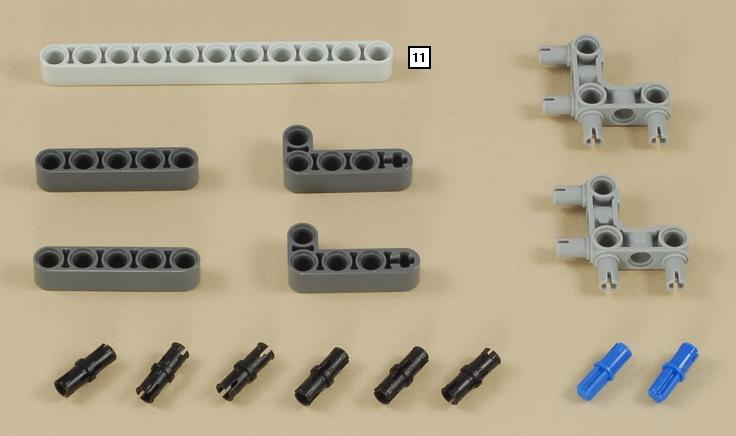

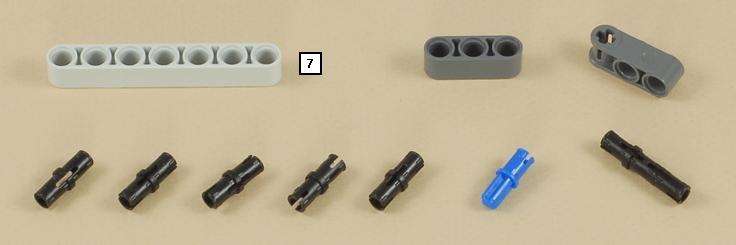
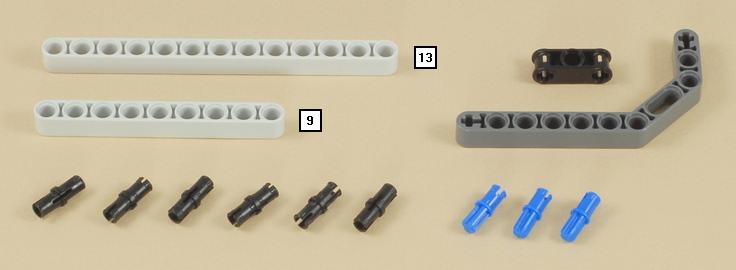
3

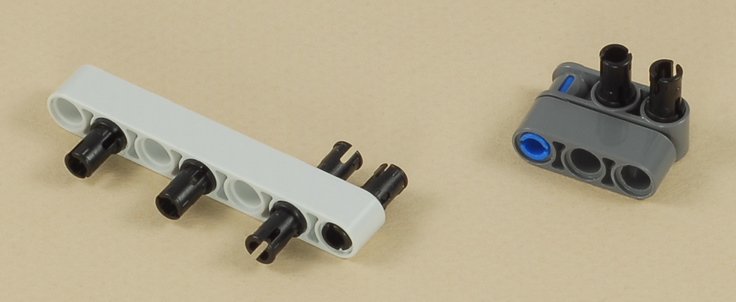
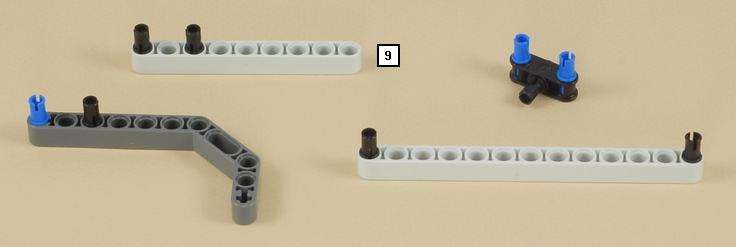
4
5

6
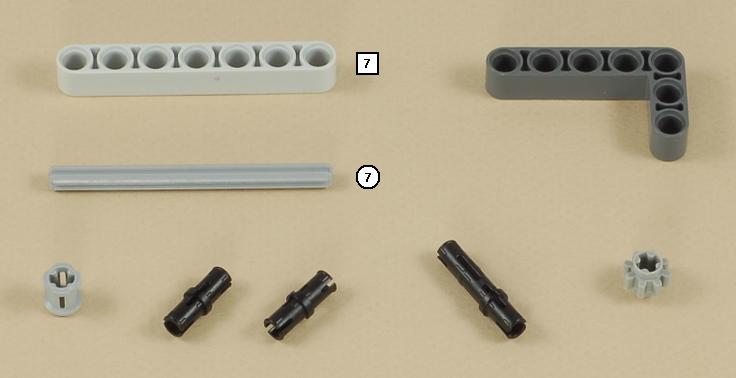
7


8
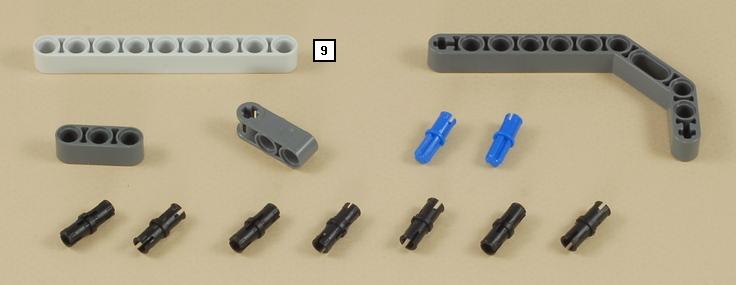


9

10
11

12


13

14
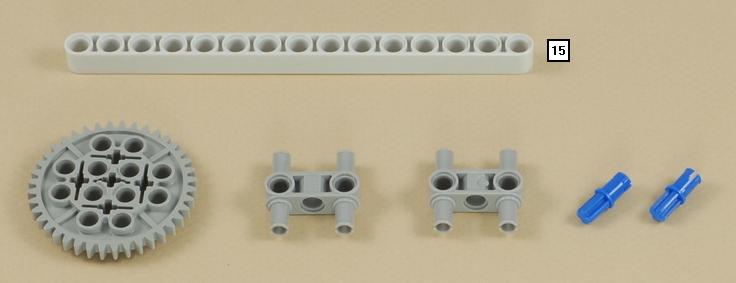
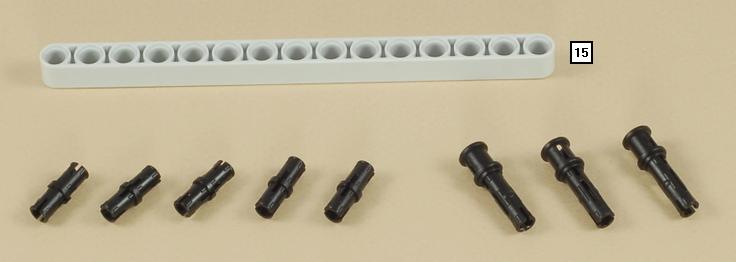
15

16
17


18


19
20


编程
程序代码Arm_Control.zip。
使用
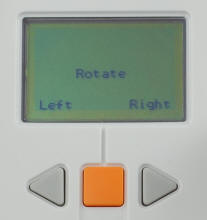
- 按下橙色选择按钮在“Rotate”和“Lift”两个模式之间切换。
- 当处于“Rotate”模式时,灰色左右箭头按钮控制手臂的左右旋转。
- 当处于“Lift”模式时,灰色左右箭头按钮控制手臂上下旋转。
- 按下触动传感器按钮可以让抓手夹起或释放。
原文地址:http://www.nxtprograms.com/robot_arm/steps.html。
发布时间:2013/11/11 20:34:12 阅读次数:9658