乐高NXT微控制器的基本组成
一个机器人之所以能有各种功能,就是因为它的高级的大脑,但它的大脑不象我们的大脑由细胞组成,它的大脑是这个世纪的决定性的发明——微电子技术构成,就是我们看到的控制器,这里我们这个控制器称为NXT。
- 输出端(Output Ports):通过3个端口(A、B和C),马达可以连接到NXT上去。
- USB端口(USB Port):这个端口可以用USB数据线把NXT和电脑相连接。
- 显示屏(Display Screen):所有有关NXT的信息多会以各种菜单的形式出现在这个屏幕上面,包括程序储存和传感器的数据。
- 左键(Cycle Left):按住这个灰色尖头按钮,使呈现在NXT屏幕上的菜单里的各种选项向左调节。
- 右键(Cycle Right):按住这个灰色尖头按钮,使呈现在NXT屏幕上的菜单里的各种选项向右调节。
- 选择键(Select):橘色的按钮是用来选择显示屏上菜单里的选项的。与此同时,当NXT被关闭后,按下橘色按钮就可以打开NXT了。
- 返回(Back):按下灰暗色的按钮将会退回上一级菜单选项(或者取消选择)。当屏幕处在主菜单的时候,按下这个按钮将会跳出关闭NXT的选项。
- 输入端(Input Ports):有4个端口(1,2,3和4),这些都可以使传感器和NXT相连。

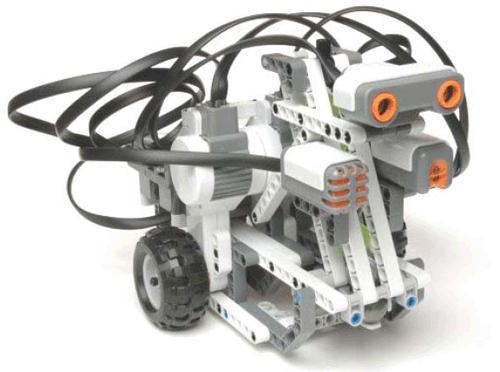
NXT看起来象个MP3一样,里面是块智能芯片。

就是这块芯片,通过程序的运行,接受各种反馈信号,并控制各种输出装置。但它和我们通常说的单片机还是有区别的,单片机一般只能运行汇编语言,而NXT作为智能控制器,各种各样的语言都可以对它进行控制,我们熟悉的C语言,VB.NET,就连最新的微软推出的MSRS都可以对它进行控制。所以,NXT不只是块单片机,我们可以称它为微电脑。它比单片机从功能等多方面都要更高一级。
而软件,作为“简易机器人制作”这门课程,这里我们着重推荐的是NXT-G软件。
作为机器人的”五感“,它的各种条件的输入设备,传感器:

机器人一词,始源于捷克的一出舞台剧,意思是奴隶,其实至今这个已经依然有着延续,就是产生生产力,产生动作行为。那么如何来产生动作行为呢?就是靠它的输出设备,马达或者灯。

马达的内部其实是一个电动机,并通过一系列的减速传动,从而马达可以形成更大的力。这个马达的内部有有芯片,可以精确记录圈数等一系列马达参数,我们称为“伺服电机”。
大脑控制器NXT通过导线连接输出和输入设备。这里的导线我们也可以理解为是神经,人也是大脑通过神经连接五官和四肢的。

NXT控制器有三个输出端口、四个输入端口和一个USB端口。
伺服电机通过连接线可以连接到NXT控制器任意输出端口(A、B、C)上,也可使用转接线缆,将灯泡或RCX系列的电机连接到输出端口上,在NXT上电机和灯泡默认设置如下:
- 端口A:此端口上电机或灯泡起到扩展功能的作用。
- 端口B:当机器人由两个电机驱动时,B端口连接一个电机,通常是机器人左边的驱动部分。
- 端口C:当机器人由两个电机驱动时,C端口连接一个电机,通常是机器人右边的驱动部分。
传感器通过连接线可以连接到NXT控制器任意输出端口(1、2、3、4)上,也可使用转换线缆,将RCX系列的传感器或第三方传感器连接到输出端口上。在NXT上传感器默认设置如下:
- 端口1:连接触动传感器
- 端口2:连接声音传感器
- 端口3:连接光电传感器
- 端口4:连接超声波传感器
在机器人领域,很多基本方式是和人体一样的,比如,人体内也有反馈,机器人控制也有反馈等等。所以,机器人这门学科,有个学术名称就是“人工智能”!
关于NXT的更详细的特性使用方法,这里不做进一步介绍,如果需要更好地了解,请参考《NXT 编程指南》一书中的第一章,其中针对NXT的硬件特性做了非常详细的说明。
文件下载(已下载 2569 次)发布时间:2013/9/15 20:12:58 阅读次数:12635