2.5 操控行为——避开障碍
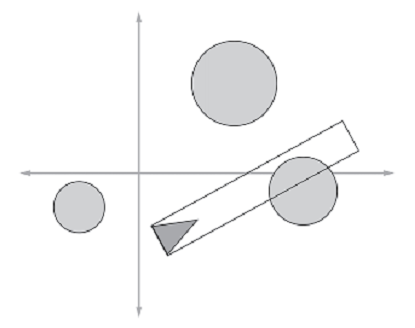
obstacle avoidance行为操控交通工具避开路上的障碍。障碍物是任何一个近似圆周(在3D中,将是球体)的物体。我们保持长方形区域(检测盒,从交通工具延伸出的)不被碰撞,就可以躲避障碍了。检测盒的宽度等于交通工具的包围半径,它的长度正比于交通工具的当前速度(它移动得越快,检测盒就越长)。
深入讲解处理过程之前,先看一下图,图中有一个交通工具、多个阻挡物和计算中用到的检测盒。
寻求最近的相交点
检查与障碍物的相交点的过程相当复杂,所以下面逐步讲解。
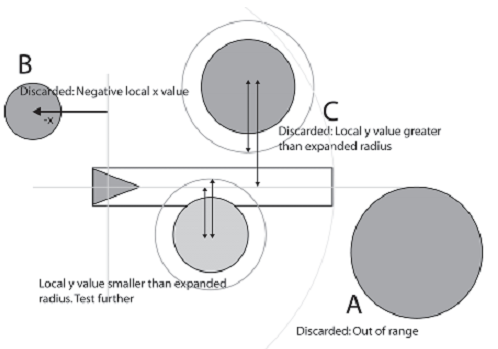
A.交通工具只考虑那些在检测盒内的障碍物。最初,避开障碍算法迭代游戏世界中所有的障碍物,标记那些在检测盒内的障碍物以作进一步分析。
B.算法然后把所有已标记的障碍物转换到交通工具的局部空间。转换坐标后,那些x坐标为负值的物体将不被考虑,所以问题就变得简单多了。
C.接下来,该算法必须测试障碍物是否和检测盒重叠。使障碍物的包围半径扩大检测盒(交通工具的包围半径)宽度的一半。然后测试该障碍物的y值是否小于这个值(即障碍物的包围半径,加上检测盒宽度的一半)。如果不小于,那么该障碍将不会与检测盒相交,所以不予继续讨论。
下图中列出了前面3步。图中障碍物上的字母A、B、C和前面的描述相对应。
D.此时,只剩下那些会与检测盒相交的障碍物了。接下来,我们找出离交通工具最近的相交点。我们将再一次在局部空间中计算,C步骤扩大了障碍物的包围半径。我们用简单的线-圆周相交测试方法可以得到被扩大的圆和x轴的相交点。如图所示,有两个相交点(我们不用担心和交通工具相切的情况,交通工具将擦过障碍物)。注意如下情况,在交通工具前面可能有个障碍物,但和交通工具相交在交通工具的后部,如图中的障碍物A,和交通工具的后部有个交点。该算法将不处理这种情况,只考虑存x轴上的交点。
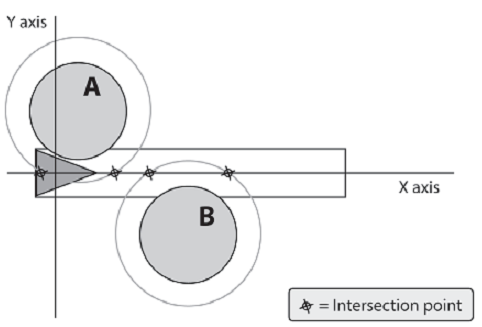
此算法测试所有剩下的障碍物,从中找出一个有最近的(正的)相交点的障碍物。在讲解如何计算操控力之前,先列出实现躲避障碍算法中从步骤A到步骤B的相关代码。
//---------------------- ObstacleAvoidance -------------------------------
//
// 给定一个障碍物集合,这个方法返回一个操控力,
// 这个力让智能体不与最近的障碍物发生碰撞。
//------------------------------------------------------------------------
public Vector2 ObstacleAvoidance(List<BaseGameEntity> obstacles)
{
// 检测盒长度正比于智能体的速度
float _dBoxLength = Global.MinDetectionBoxLength +
(_vehicle.Speed / _vehicle.MaxSpeed) * Global.MinDetectionBoxLength;
// 标记在检测盒半径之内的障碍物
_vehicle.World.TagObstaclesWithinViewRange(_vehicle, _dBoxLength);
// 保存最近的相交障碍物(CIB)
BaseGameEntity ClosestIntersectingObstacle = null;
// 到最近相交障碍物的距离
float DistToCIB = float.MaxValue ;
// 保存最近相交障碍物在局部空间中的坐标
Vector2 LocalPosOfClosestObstacle=Vector2 .Zero ;
foreach(BaseGameEntity curOb in obstacles )
{
// 如果该障碍物被标记在范围内
if (curOb.IsTagged)
{
// 计算这个障碍物在智能体的局部空间中的位置
Vector2 LocalPos = Vector2.Transform(curOb.Pos,
Matrix.Invert(Matrix.CreateRotationZ((float)(Math.Atan2(_vehicle.Heading.Y, _vehicle.Heading.X)))
* Matrix.CreateTranslation(new Vector3(_vehicle.Pos, 0))));
// 如果局部空间中的X为负,那么障碍物在智能体后方,可以忽略。
// 所以我们只考虑X不为负的情况。
if (LocalPos.X >= 0)
{
// 如果障碍物到x轴的距离小于它的半径+检测盒宽度的一半,
// 则有可能相交。
float ExpandedRadius = curOb.BRadius + _vehicle.BRadius;
if (Math.Abs(LocalPos.Y) < ExpandedRadius)
{
// 进行线/圆周相交测试。圆周中心坐标用(cX, cY)表示,
// 相交点在局部空间x轴上的坐标值由公式x = cX +/-sqrt(r^2-cY^2)给出,此时y=0。
// 我们只需要x的最小正值,它就是最近的相交点。
float cX = LocalPos.X;
float cY = LocalPos.Y;
float SqrtPart = (float)Math.Sqrt(ExpandedRadius*ExpandedRadius - cY*cY);
float ip = cX - SqrtPart;
if (ip <= 0.0)
{
ip = cX + SqrtPart;
}
// 测试是不是最近点,如果是则保存这个障碍物和的局部坐标
//record of the obstacle and its local coordinates
if (ip < DistToCIB)
{
DistToCIB = ip;
ClosestIntersectingObstacle = curOb;
LocalPosOfClosestObstacle = LocalPos;
}
}
}
}
}
计算操控力
计算操控力是容易的,通常分成两部分:侧向操控力和制动操控力,如图所示。
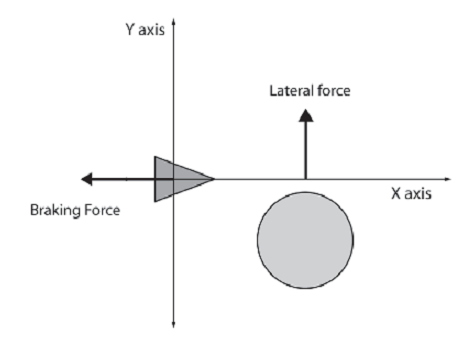
我们有许多方法可以计算侧向操控力,此处建议如下这种:障碍物包围半径减去其在局部空间中的y值。这会产生一个侧向操控力使其远离障碍物,它会随着障碍物到x轴的距离而减少。该力正比于交通工具到障碍物的距离(因为交通工具离障碍物越近,反应越快)。
操控力的另一部分是制动力。该力沿着图中的负x轴方向,其大小正比于交通工具到障碍物的距离。最后,把操控力转换到世界空间,就是该方法的返回的结果。代码如下:
// 如果我们找到了一个相交障碍物,则计算一个远离它的力
Vector2 SteeringForce=Vector2.Zero ;
if (ClosestIntersectingObstacle!=null)
{
// 智能体离物体越近,操控力就应越强
float multiplier = 1.5f + (_dBoxLength - LocalPosOfClosestObstacle.X) / _dBoxLength;
// 计算侧向力
if( LocalPosOfClosestObstacle.Y>0)
SteeringForce.Y = (-ClosestIntersectingObstacle.BRadius - LocalPosOfClosestObstacle.Y)
* multiplier;
else
SteeringForce.Y = (ClosestIntersectingObstacle.BRadius- LocalPosOfClosestObstacle.Y)
* multiplier;
// 施加一个制动力,它正比于智能体到障碍物的距离
const float BrakingWeight = 0.6f;
SteeringForce.X = (ClosestIntersectingObstacle.BRadius - LocalPosOfClosestObstacle.X) *
BrakingWeight;
}
// 最后,将操控力向量从局部坐标转换到世界坐标
return Vector2.Transform(SteeringForce,
Matrix.CreateRotationZ((float)(Math.Atan2(_vehicle.Heading.Y, _vehicle.Heading.X))));
}
辅助方法
在上述ObstacleAvoidance方法中还用到了些辅助方法,这些辅助方法都位于GameWorld类中,代码如下:
// 创建一些随机大小的障碍物
private void CreateObstacles()
{
for (int i=0; i <Global.NumObstacles; i++)
{
bool bOverlapped = true;
// 不停尝试直至找到一个不与其他障碍物重叠的障碍物。
int NumTrys = 0; int NumAllowableTrys = 2000;
while (bOverlapped)
{
NumTrys++;
if (NumTrys > NumAllowableTrys)
return;
// 随机产生一个介于MinObstacleRadius和MaxObstacleRadius之间的半径
int radius = Global.random.Next((int)Global.MinObstacleRadius, (int)Global.MaxObstacleRadius);
// 障碍物至少与边界距离10,障碍物之间至少距离20
int border = 10;
int MinGapBetweenObstacles = 20;
Obstacle ob = new Obstacle(Global.random.Next(radius + border, _xClient - radius - border),
Global.random.Next(radius + border, _yClient - radius - 40 - border), radius);
if (!Overlapped(ob, _obstacles, MinGapBetweenObstacles))
{
// 如果不重叠则添加到集合中
_obstacles.Add(ob);
bOverlapped = false;
}
}
}
}
//------------------------- Overlapped -----------------------------------
//
// 测试一个实体是否与另一个实体集合中的某个相交
//------------------------------------------------------------------------
private bool Overlapped(BaseGameEntity ob, List<BaseGameEntity> conOb, float MinDistBetweenObstacles)
{
foreach (BaseGameEntity it in conOb)
{
if (TwoCirclesOverlapped(ob.Pos, ob.BRadius + MinDistBetweenObstacles, it.Pos, it.BRadius))
{
return true;
}
}
return false;
}
//----------------------------- TwoCirclesOverlapped ---------------------
//
// 如果两个圆相交则返回true
//------------------------------------------------------------------------
private bool TwoCirclesOverlapped(Vector2 c1, float r1, Vector2 c2, float r2)
{
float DistBetweenCenters = Vector2.Distance(c1, c2);
if ((DistBetweenCenters < (r1 + r2)) || (DistBetweenCenters < Math.Abs(r1 - r2)))
{
return true;
}
return false;
}
// 给在range半径范围内的障碍物做标记
public void TagObstaclesWithinViewRange(BaseGameEntity vehicle, float range)
{
TagNeighbors(vehicle, _obstacles, range);
}
//----------------------- TagNeighbors ----------------------------------
//
// 在实体集合ContainerOfEntities中,若某个实体位于以指定实体entity为圆心,
// radius为半径的范围内,则对它打上标记
//------------------------------------------------------------------------
private void TagNeighbors(BaseGameEntity entity, List<BaseGameEntity> ContainerOfEntities, float radius)
{
foreach (BaseGameEntity curEntity in ContainerOfEntities)
{
// 首先取消标记
curEntity.UnTag();
// 两个实体间的距离
Vector2 to = curEntity.Pos - entity.Pos;
// 还需考虑包围球半径
float range = radius + curEntity.BRadius;
// 若在范围内,则打上标记
if ((curEntity != entity) && (to.LengthSquared() < range * range))
{
curEntity.Tag();
}
}
}
文件下载(已下载 581 次)
发布时间:2013/8/23 21:25:45 阅读次数:5809