2.4 操控行为——追逐、逃避
Pursuit(追逐)
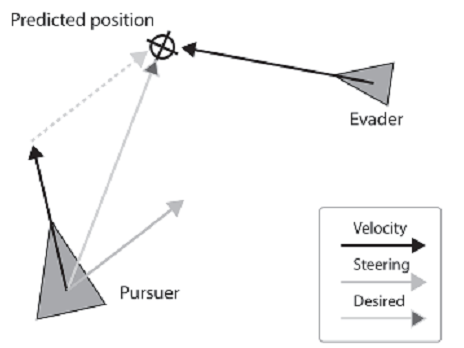
当智能体要拦截一个可移动的目标时,pursuit行为就变得很有用。当然它能向目标的当前位置靠近,但是这不能制造出智能的假象。想象你还是个小孩,在操场上玩“单脚抓人”游戏。当想抓住某人时,你不会直接移向他们的当前位置(有效地靠近他们)。你预测他们的未来位置,然后移向那个偏移位置,其间通过不断调整来缩短差距。下图演示了这一行为。
pursuit函数的成功与否取决于追逐者预测逃避者的运动轨迹有多准。这可以变得很复杂,所以做个折衷以得到足够的效率但又不会消耗太多的时钟周期。
追逐者可能会碰到一种提前结束(enables an early out)的情况:如果逃避者在前而,几乎面对智能体,那么智能体应该直接向逃避者当前位置移动。这可以通过点积快速算出。在示例代码中,逃避者朝向的反方向和智能体的朝向必须在20°内(近似)才被认为是面对着的。
一个好的预测的难点之一就是决定预测多远。很明显,这个“多远”应该正比于追逐者与逃避者的距离,反比于追逐者和逃避者的速度。一旦这“多远”确定了,我们就可以估算出追逐者seek的位置。让我们看一下这个行为的代码:
//------------------------------ Pursuit ---------------------------------
//
// 这个行为产生一个力,操控智能体朝向逃避者
//------------------------------------------------------------------------
private Vector2 Pursuit(Vehicle evader)
{
// 如果逃避者位于追逐者之前且正对(本例中正对的意思是朝向的夹角不超过约18度),
// 那么只需Seek逃避者的当前位置
Vector2 ToEvader = evader.Pos - _vehicle.Pos;
float RelativeHeading = Vector2.Dot (_vehicle.Heading,evader.Heading);
if ( (Vector2.Dot (ToEvader,_vehicle.Heading) > 0) && (RelativeHeading < -0.95)) //acos(0.95)=18 degs
{
return Seek(evader.Pos);
}
// 如果不是正对则需要预测逃避者的位置。
// 预测的时间正比于两者的距离,反比于两者的速度之和
float LookAheadTime = ToEvader.Length() / (_vehicle.MaxSpeed + evader.Speed);
// 十字光标表示预测位置
_vehicle.World.PositionCrosshair = evader.Pos + evader.Velocity * LookAheadTime;
// Seek逃避者的预测位置
return Seek(evader.Pos + evader.Velocity * LookAheadTime);
}
在pursuit行为的示例程序中,一个小的交通工具正在被一个大的追逐。十字准线位置正是我们预测的逃避者的下一个位置。(逃避者用wander操控行为实现运动)。
我们通过把目标传给相关方法来为追逐者设置猎物。示例程序中有两个智能体,一个追逐,一个徘徊,就像这样:
prey.Steering.WanderOn(); predator.Steering.PursuitOn(prey);
下面让我们讨论pursuit的相反行为——evade(逃避) 。
Evade(逃避)
除了逃避者远离预测的位置这一点,evade几乎和pursuit一样。
//----------------------------- Evade ------------------------------------
//
// 与pursuit类似,唯一相反的是智能体是在逃避追逐者的预测位置
//------------------------------------------------------------------------
private Vector2 Evade(Vehicle pursuer)
{
Vector2 ToPursuer = pursuer.Pos - _vehicle.Pos;
// 只有在在ThreatRange范围内才会产生Evade行为
float ThreatRange = 100.0f;
if (ToPursuer.LengthSquared() > ThreatRange * ThreatRange)
return Vector2.Zero ;
// 预测的时间正比于两者的距离,反比于两者的速度之和
float LookAheadTime = ToPursuer.Length() / (_vehicle.MaxSpeed + pursuer.Speed);
// 十字光标表示预测位置
_vehicle.World.PositionCrosshair = pursuer.Pos + pursuer.Velocity * LookAheadTime;
// Flee追逐者的预测位置
return Flee(pursuer.Pos + pursuer.Velocity * LookAheadTime);
}
注意,这次没有必要检查面向方向。
文件下载(已下载 738 次)
发布时间:2013/8/19 22:15:19 阅读次数:6403