2.3 操控行为——徘徊
当创建智能体的行为时,你经常会发现wander行为很有用。它产生一个操控力,使智能体在环境中随机走动。
一个幼稚的做法是每帧都计算出一个随机的驱动力。但这会产生抖动,不能达到持久的转弯(事实上,一个好的随机函数,Perlin噪声,可以产生光滑转弯,但是CPU的开销会很大。当然当你没有其他办法时,这仍然是个办法,Perlin噪声有很多应用程序)。
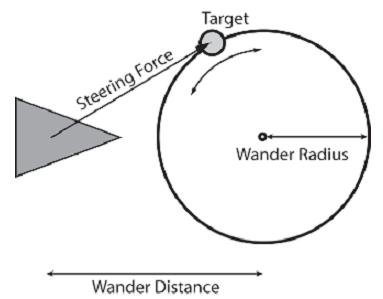
Reynolds的解决方案是在交通工具的前端凸出个圆圈,目标被限制在该圆圈上,然后我们移向目标。每帧给目标添加一个随机的位移,随着时间的推移,沿着圆周移来移去,以创建一个没有抖动的往复运动。利用不同的圆圈尺寸、到交通工具的距离、每帧的随机位移的大小,这个方法可以产生所有范围的随机运动,从非常光滑的波状式转弯到狂野的Strictly Ballroom式旋转,再到以脚尖立地的旋转。下图可帮助你更好地理解这个方法。
下面一步一步讲解代码。首先是wander使用的3个成员变量:
private float _wanderJitter; // 每秒加到目标的随机位移的最大值 private float _wanderRadius; // wander圆半径 private float _wanderDistance; // wander圆凸出在智能体前面的距离
接下来是方法本身:
//--------------------------- Wander -------------------------------------
//
// 这个行为让智能体在环境中随机行走
//------------------------------------------------------------------------
public Vector2 Wander()
{
float JitterThisTimeSlice = _wanderJitter * _vehicle.TimeElapsed;
// 首先,在目标位置上加一个随机向量
_wanderTarget += new Vector2((((float)Global.random .NextDouble())*2.0f-1.0f) * JitterThisTimeSlice,
(((float)Global.random .NextDouble())*2.0f-1.0f) * JitterThisTimeSlice);
// 将这个向量重新投影到单位圆周上
if(_wanderTarget!=Vector2 .Zero )
_wanderTarget.Normalize();
// 然后将这个向量的长度等于wander圆的半径
_wanderTarget *= _wanderRadius;
// 移动目标到智能体前面WanderDist的位置
Vector2 targetLocal = _wanderTarget + new Vector2(_wanderDistance, 0);
// 对三角形的顶点进行变换
transformMatrix = Matrix.CreateScale (_vehicle.BRadius )*
Matrix.CreateRotationZ((float)(Math.Atan2(_vehicle.Heading.Y, _vehicle.Heading.X)))*
Matrix.CreateTranslation(new Vector3(_vehicle.Pos, 0));
targetWorld = Vector2.Transform (targetLocal,transformMatrix);
return targetWorld - _vehicle.Pos;
}
_wanderTarget是一个点,被限制半径为_wanderRadius的圆圈上,以交通工具为中心,我们每帧都给wander目标位置添加一个小的随机的位移,如图A所示。

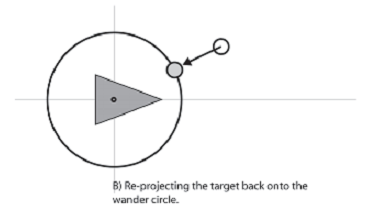
下一步,通过把归一化向量再乘上wander圈的半径,就可以把新的目标重新投影到wander圆上,如图B所示。
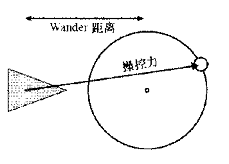
最后,新的目标移到交通工具的前面距离等于_wanderDistance的位置,投影到世界空间。然后,计算向量移动到这个位置所需的操控力,如图C所示。
看一下这个行为的示例程序。绿色的圆是限定的wander圈,红色的点是目标。这个示例程序允许调整wander圈的尺寸、抖动的数量、wander距离。所以你可以观察到它们不同的作用。注意wander距离和这个方法返同的操控力的角度变化之间的关系。当wander圆离交通工具很远时,这个方法使角度发生小变化,因此交通工具只能小转弯。当圆被移近交通工具时,它就可以大转弯了。
如果想让智能体在三维空间(像空中飞船在它的领地上巡逻)wander,你所要做的是限制wander圆为1个球体,而不是圆周。
文件下载(已下载 650 次)
发布时间:2013/8/18 20:47:21 阅读次数:5321