实验二十三 机械能守恒定理(摆球法)
实验目的
用摆球法验证机械能守恒定律。
实验原理
把一个摆球用细线悬挂起来并拉到一定的高度,然后放开,摆球在摆动过程中,动能和势能发生相互转化,忽略空气的阻力影响,因只有重力对其做功,所以机械能守恒。
取摆球摆动时最低点为零势点,将光电门传感器固定在不同点,设此点的高度为h,则在两光电门传感器处摆球的机械能为:E=mv2/2+mgh;
本实验中,摆球为直径为0.008m小圆柱体,质量为0.0075kg,摆球通过光电门传感器时的挡光时间为t1,所以:摆球的速度为v=0.008/t1。
实验器材
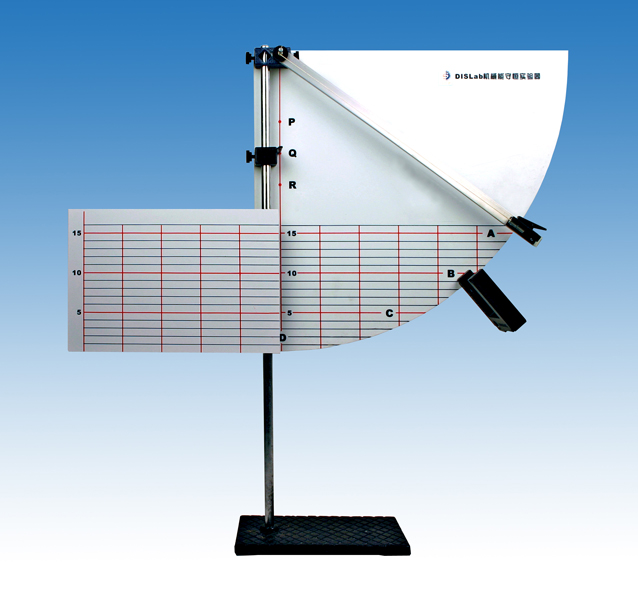
朗威DISLab、计算机、DISLab机械能守恒实验器(图23-1)、天平等。
实验装置图
见图23-2。

实验过程与数据分析
1.将DISLab机械能守恒实验器按装配图安装好(参照《用户手册》),把光电门传感器固定在实验器的A点,并接入数据采集器的第一通道;
2.将小摆球用磁铁夹吸住,固定在A点上方5~10厘米处;
3.移动光电门传感器固定臂,使用测平器观察并调整光电门的透光孔正好在A点;
4.打开“计算表格”,点击“自动记录”中的“开始”,释放摆球,当摆球通过光电门传感器后,阻止摆球回摆;
5.移动光电门传感器固定臂,使用测平器观察并调整光电门的透光孔分别位于B、C、D点,重复步骤4,获得四次实验数据;
6.点击“变量”分别定义“h”“m”表示光电门距零势点的高度和摆球的质量,并输入相应的数据;
7.点击“公式”,输入计算摆球速度和摆球在各点的机械能公式,得到实验结果(图23-3);
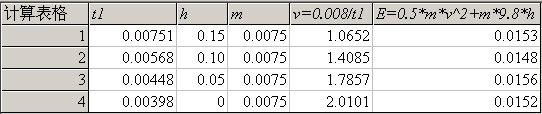
8.由结果可见:摆球在四个点的机械能变化范围小于5%。在误差范围内,可得出结论:在只有重力做功的情况下,机械能守恒。
文件下载(已下载 2479 次)发布时间:2013/1/22 12:31:47 阅读次数:12306