实验二十 功和能
实验目的
探究物体在恒力的作用下,所受合力所做的功与物体动能变化的关系。
实验原理
由动能定理:合力所做的功等于物体动能变化量,即W=Ek2-Ek1。
用小钩码拉动小车在轨道上滑动。如果小钩码的质量远小于小车的质量,可认为小车是在恒力的作用下运行。测出小车分别通过两光电门的时间和运行距离,通过计算得出力对小车做的功和动能变化。
实验器材
朗威DISLab、计算机、DISLab力学轨道和配套小车等附件、天平、小钩码、小沙桶。
实验装置图
见图20-1。
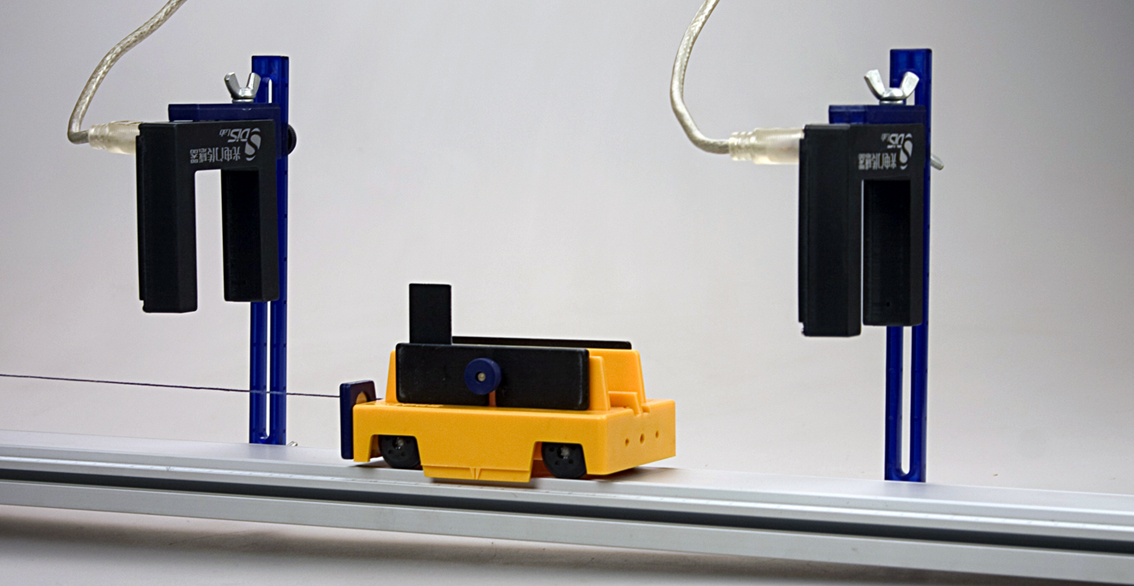
图20-1 实验装置图
实验过程与数据分析
1.在小车上安装“I”型挡光片(本次实验所用挡光片的两前沿距离为0.020m),用天平称出小车的总质量M=0.225(kg)及小钩码的质量m1(kg);
2.将两只光电门传感器接入数据采集器的第一、二通道,分别用“I”型支架固定在轨道的一侧;
3.调整力学轨道水平,将小钩码悬挂在轨道末端下方,并通过牵引绳与小车连接,对小车施加拉力;
4.点击“光电门设置”,挡光片类型选择“I型”;
5.利用轨道上的标尺确定两光电门之间的距离s(本次实验为0.30m);
6.打开“计算表格”窗口,点击“开始”,令小车从轨道的一端向下运动,使挡光片依次通过两光电门,则挡光片通过两只光电门传感器的挡光时间t1、t2会记录在表格中;
7.在计算表格中,增加变量“M”、“m1”、“s”,并输入相应数值,添加公式“F”;
8.在计算表格中分别以“自由表达式”的方法输入计算“动能变化”、“功”的公式:E=0.225*((0.002/t2)^2-(0.002/t1)^2)/2、W=F*0.30,不改变钩码的质量,重复实验,得出图20-2所示的计算结果;

图20-2 功和能实验数据
9.输入计算“动能变化”和“功”二者的相对误差公式:n=(W-E)/(W+E)/2 ,可见结果在误差允许的范围内二者相等;
10.增加小钩码的质量,重复实验,得到图20-3所示的5组数据,可见实验结果在误差允许的范围仍是相等的。

图20-3 功和能实验数据(改变拉力)
本实验亦可使用气垫导轨。
实验器材
朗威DISLab、计算机、气垫导轨、天平、小钩码、配重片等。
实验装置图
见图20-4。
图20-4 实验装置图(气轨)
实验过程与数据分析
1.在滑块上安装“U”型挡光片(本次实验所用挡光片的两前沿距离为0.030m),用天平称出滑块的总质量m(kg)及小钩码与配重片的总质量m1(kg);
2.将两只光电门传感器接入数据采集器的第一、二通道,将其固定在气垫导轨或铁架台上;
3.调整气垫导轨水平,将小钩码与配重片悬挂在导轨末端下方,并通过牵引绳与滑块连接,对滑块施加拉力;
4.启动气垫导轨的气源,检测并调整光电门的高度,使挡光片顺利挡光;
5.点击“光电门设置”,挡光片类型选择“U型”;
6.用气轨上的标尺读出两光电门的距离s(本次实验为0.50m);
7.打开“计算表格”窗口,点击自动记录中的“开始”,令滑块从气轨的一端滑动,使挡光片依次通过两光电门,则挡光片通过两只光电门传感器的挡光时间t1、t2会记录在表格中;
8.逐次增加配重片的质量并手动记录之,使其对滑块施加的拉力逐次增大,采用上述实验的步骤,测出不同拉力下的数值;
9.在计算表格中,增加变量“m”、“m1”和“s”,并输入相应数值;
10.分别输入计算“拉力”、“动能变化”、“功”的自由表达式“F=9.8*m1”、E=0.5* m ((0.03/t2)^2-(0.03/t1)^2)、W=F*s,得出计算结果(图20-5);

图20-5 功和能实验数据
11.输入计算“动能变化”和“功”二者的相对误差公式:n=(W-E)/((W+E)/2) ,发现结果在0.45%~4.18%之间,说明在误差允许的范围内二者相等。
文件下载(已下载 2244 次)发布时间:2013/1/18 12:08:15 阅读次数:8927